 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuiding Generative Storytelling with Knowledge Graphs
May 30, 2025Large Language Models (LLMs) have shown great potential in automated story generation, but challenges remain in maintaining long-form coherence and providing users with intuitive and effective control. Retrieval-Augmented Generation (RAG) has proven effective in reducing hallucinations in text generation; however, the use of structured data to support generative storytelling remains underexplored. This paper investigates how knowledge graphs (KGs) can enhance LLM-based storytelling by improving narrative quality and enabling user-driven modifications. We propose a KG-assisted storytelling pipeline and evaluate its effectiveness through a user study with 15 participants. Participants created their own story prompts, generated stories, and edited knowledge graphs to shape their narratives. Through quantitative and qualitative analysis, our findings demonstrate that knowledge graphs significantly enhance story quality in action-oriented and structured narratives within our system settings. Additionally, editing the knowledge graph increases users' sense of control, making storytelling more engaging, interactive, and playful.
Enhanced Sampling, Public Dataset and Generative Model for Drug-Protein Dissociation Dynamics
Apr 25, 2025Drug-protein binding and dissociation dynamics are fundamental to understanding molecular interactions in biological systems. While many tools for drug-protein interaction studies have emerged, especially artificial intelligence (AI)-based generative models, predictive tools on binding/dissociation kinetics and dynamics are still limited. We propose a novel research paradigm that combines molecular dynamics (MD) simulations, enhanced sampling, and AI generative models to address this issue. We propose an enhanced sampling strategy to efficiently implement the drug-protein dissociation process in MD simulations and estimate the free energy surface (FES). We constructed a program pipeline of MD simulations based on this sampling strategy, thus generating a dataset including 26,612 drug-protein dissociation trajectories containing about 13 million frames. We named this dissociation dynamics dataset DD-13M and used it to train a deep equivariant generative model UnbindingFlow, which can generate collision-free dissociation trajectories. The DD-13M database and UnbindingFlow model represent a significant advancement in computational structural biology, and we anticipate its broad applicability in machine learning studies of drug-protein interactions. Our ongoing efforts focus on expanding this methodology to encompass a broader spectrum of drug-protein complexes and exploring novel applications in pathway prediction.
Human-AI Collaborative Game Testing with Vision Language Models
Jan 20, 2025



As modern video games become increasingly complex, traditional manual testing methods are proving costly and inefficient, limiting the ability to ensure high-quality game experiences. While advancements in Artificial Intelligence (AI) offer the potential to assist human testers, the effectiveness of AI in truly enhancing real-world human performance remains underexplored. This study investigates how AI can improve game testing by developing and experimenting with an AI-assisted workflow that leverages state-of-the-art machine learning models for defect detection. Through an experiment involving 800 test cases and 276 participants of varying backgrounds, we evaluate the effectiveness of AI assistance under four conditions: with or without AI support, and with or without detailed knowledge of defects and design documentation. The results indicate that AI assistance significantly improves defect identification performance, particularly when paired with detailed knowledge. However, challenges arise when AI errors occur, negatively impacting human decision-making. Our findings show the importance of optimizing human-AI collaboration and implementing strategies to mitigate the effects of AI inaccuracies. By this research, we demonstrate AI's potential and problems in enhancing efficiency and accuracy in game testing workflows and offers practical insights for integrating AI into the testing process.
AI Nushu: An Exploration of Language Emergence in Sisterhood -Through the Lens of Computational Linguistics
Oct 18, 2023This paper presents "AI Nushu," an emerging language system inspired by Nushu (women's scripts), the unique language created and used exclusively by ancient Chinese women who were thought to be illiterate under a patriarchal society. In this interactive installation, two artificial intelligence (AI) agents are trained in the Chinese dictionary and the Nushu corpus. By continually observing their environment and communicating, these agents collaborate towards creating a standard writing system to encode Chinese. It offers an artistic interpretation of the creation of a non-western script from a computational linguistics perspective, integrating AI technology with Chinese cultural heritage and a feminist viewpoint.
Moving Object Detection and Tracking with 4D Radar Point Cloud
Sep 18, 2023



Mobile autonomy relies on the precise perception of dynamic environments. Robustly tracking moving objects in 3D world thus plays a pivotal role for applications like trajectory prediction, obstacle avoidance, and path planning. While most current methods utilize LiDARs or cameras for Multiple Object Tracking (MOT), the capabilities of 4D imaging radars remain largely unexplored. Recognizing the challenges posed by radar noise and point sparsity in 4D radar data, we introduce RaTrack, an innovative solution tailored for radar-based tracking. Bypassing the typical reliance on specific object types and 3D bounding boxes, our method focuses on motion segmentation and clustering, enriched by a motion estimation module. Evaluated on the View-of-Delft dataset, RaTrack showcases superior tracking precision of moving objects, largely surpassing the performance of the state of the art.
Self-Supervised Scene Flow Estimation with 4D Automotive Radar
Mar 02, 2022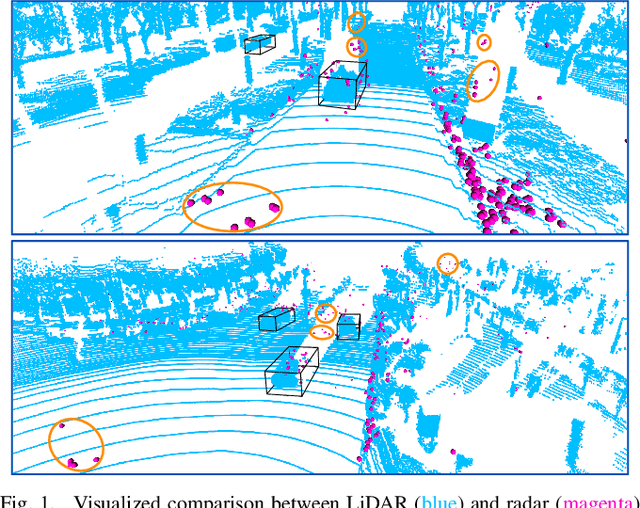
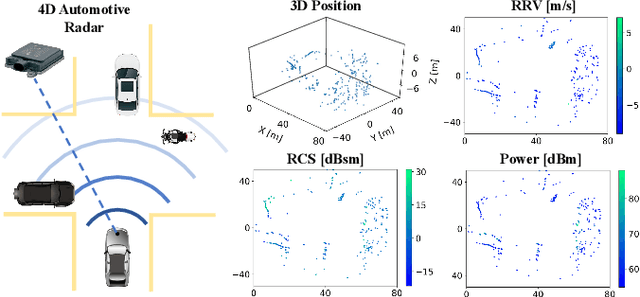
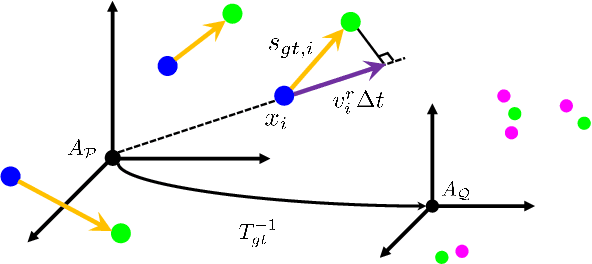
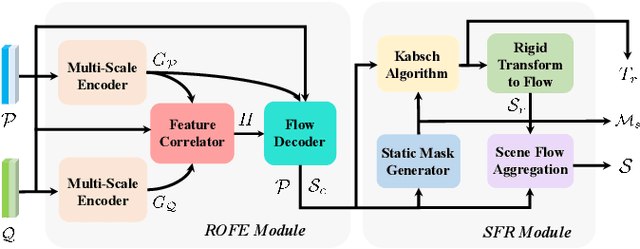
Scene flow allows autonomous vehicles to reason about the arbitrary motion of multiple independent objects which is the key to long-term mobile autonomy. While estimating the scene flow from LiDAR has progressed recently, it remains largely unknown how to estimate the scene flow from a 4D radar - an increasingly popular automotive sensor for its robustness against adverse weather and lighting conditions. Compared with the LiDAR point clouds, radar data are drastically sparser, noisier and in much lower resolution. Annotated datasets for radar scene flow are also in absence and costly to acquire in the real world. These factors jointly pose the radar scene flow estimation as a challenging problem. This work aims to address the above challenges and estimate scene flow from 4D radar point clouds by leveraging self-supervised learning. A robust scene flow estimation architecture and three novel losses are bespoken designed to cope with intractable radar data. Real-world experimental results validate that our method is able to robustly estimate the radar scene flow in the wild and effectively supports the downstream task of motion segmentation.