 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond WER: A Paired Acoustic Stress Test for Ambient Clinical Scribes
Jun 04, 2026Ambient clinical scribes increasingly combine Automatic Speech Recognition with Large Language Models to automate documentation. However, traditional metrics like Word Error Rate mask systemic safety degradation. We present a paired acoustic stress test to isolate the causal impact of noise on clinical reasoning. For the same dialogues, we inject diverse noise types while keeping the downstream model configuration frozen. Crucially, we uncover a dangerous disconnect between signal fidelity and clinical safety. Stationary ambient noise increased the Word Error Rate by a negligible 0.71 percentage points yet nearly doubled the rate of unsafe outputs. Our analysis reveals that minor acoustic perturbations can invert clinical meaning without substantially inflating error rates. Furthermore, we demonstrate a lightweight mitigation strategy that mitigates safety degradation under noisy conditions without requiring model fine tuning.
3D Scene Graph: A Structure for Unified Semantics, 3D Space, and Camera
Oct 06, 2019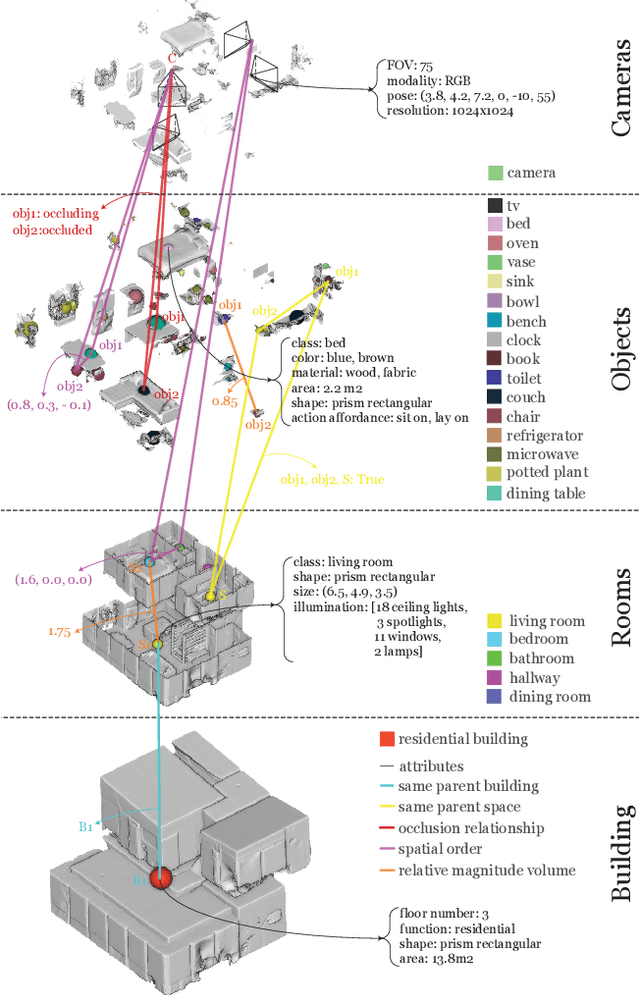
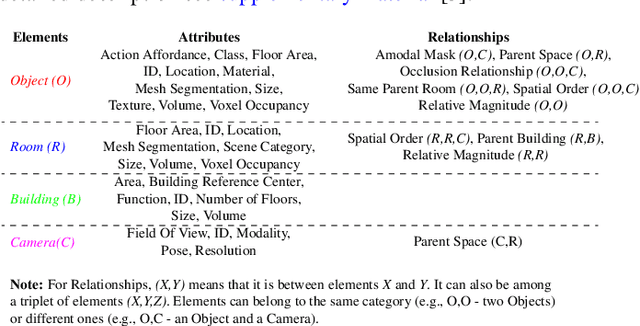
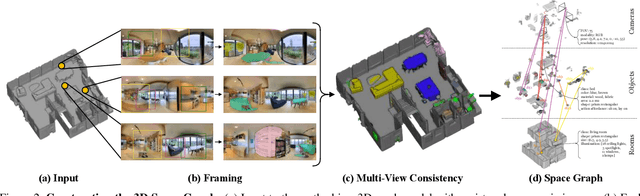
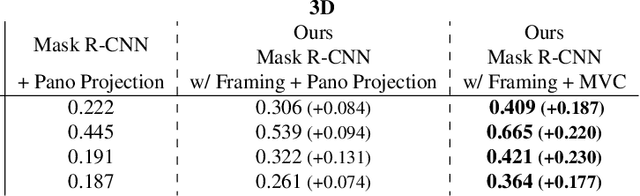
A comprehensive semantic understanding of a scene is important for many applications - but in what space should diverse semantic information (e.g., objects, scene categories, material types, texture, etc.) be grounded and what should be its structure? Aspiring to have one unified structure that hosts diverse types of semantics, we follow the Scene Graph paradigm in 3D, generating a 3D Scene Graph. Given a 3D mesh and registered panoramic images, we construct a graph that spans the entire building and includes semantics on objects (e.g., class, material, and other attributes), rooms (e.g., scene category, volume, etc.) and cameras (e.g., location, etc.), as well as the relationships among these entities. However, this process is prohibitively labor heavy if done manually. To alleviate this we devise a semi-automatic framework that employs existing detection methods and enhances them using two main constraints: I. framing of query images sampled on panoramas to maximize the performance of 2D detectors, and II. multi-view consistency enforcement across 2D detections that originate in different camera locations.
Gibson Env: Real-World Perception for Embodied Agents
Aug 31, 2018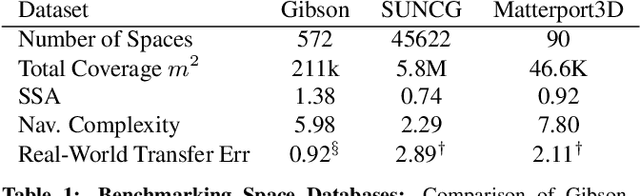
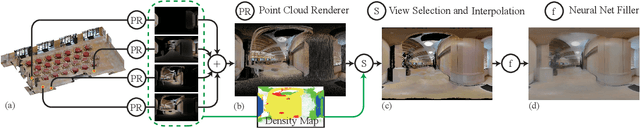
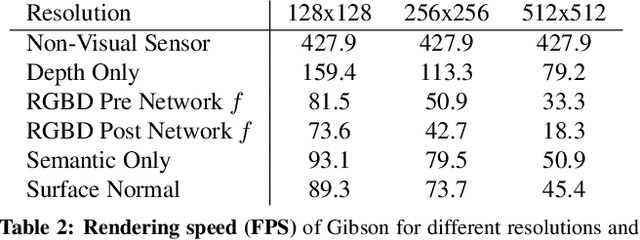
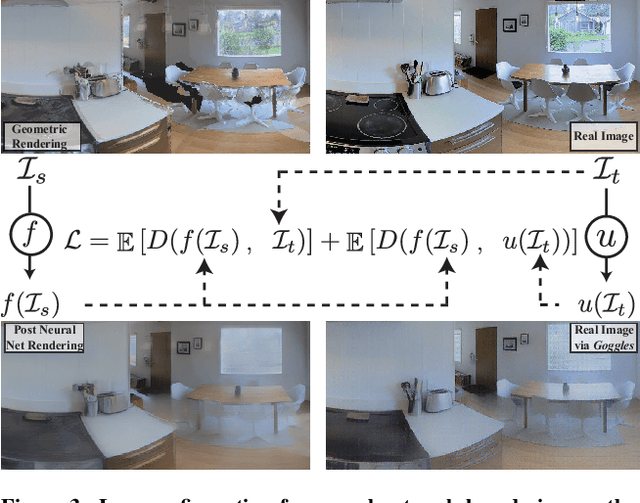
Developing visual perception models for active agents and sensorimotor control are cumbersome to be done in the physical world, as existing algorithms are too slow to efficiently learn in real-time and robots are fragile and costly. This has given rise to learning-in-simulation which consequently casts a question on whether the results transfer to real-world. In this paper, we are concerned with the problem of developing real-world perception for active agents, propose Gibson Virtual Environment for this purpose, and showcase sample perceptual tasks learned therein. Gibson is based on virtualizing real spaces, rather than using artificially designed ones, and currently includes over 1400 floor spaces from 572 full buildings. The main characteristics of Gibson are: I. being from the real-world and reflecting its semantic complexity, II. having an internal synthesis mechanism, "Goggles", enabling deploying the trained models in real-world without needing further domain adaptation, III. embodiment of agents and making them subject to constraints of physics and space.
* Access the code, dataset, and project website at http://gibsonenv.vision/ . CVPR 2018