 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural-Assisted in-Motion Self-Heading Alignment
Mar 31, 2026Autonomous platforms operating in the oceans require accurate navigation to successfully complete their mission. In this regard, the initial heading estimation accuracy and the time required to achieve it play a critical role. The initial heading is traditionally estimated by model-based approaches employing orientation decomposition. However, methods such as the dual vector decomposition and optimized attitude decomposition achieve satisfactory heading accuracy only after long alignment times. To allow rapid and accurate initial heading estimation, we propose an end-to-end, model-free, neural-assisted framework using the same inputs as the model-based approaches. Our proposed approach was trained and evaluated on real-world dataset captured by an autonomous surface vehicle. Our approach shows a significant accuracy improvement over the model-based approaches achieving an average absolute error improvement of 53%. Additionally, our proposed approach was able to reduce the alignment time by up to 67%. Thus, by employing our proposed approach, the reduction in alignment time and improved accuracy allow for a shorter deployment time of an autonomous platform and increased navigation accuracy during the mission.
Transformer-Based Robust Underwater Inertial Navigation in Prolonged Doppler Velocity Log Outages
Apr 10, 2025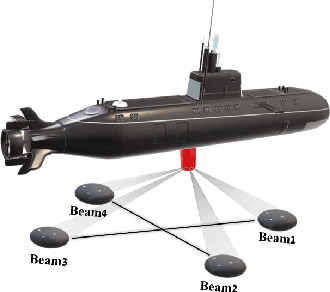
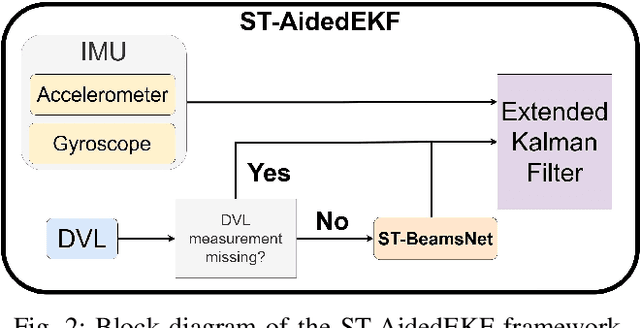
Autonomous underwater vehicles (AUV) have a wide variety of applications in the marine domain, including exploration, surveying, and mapping. Their navigation systems rely heavily on fusing data from inertial sensors and a Doppler velocity log (DVL), typically via nonlinear filtering. The DVL estimates the AUV's velocity vector by transmitting acoustic beams to the seabed and analyzing the Doppler shift from the reflected signals. However, due to environmental challenges, DVL beams can deflect or fail in real-world settings, causing signal outages. In such cases, the AUV relies solely on inertial data, leading to accumulated navigation errors and mission terminations. To cope with these outages, we adopted ST-BeamsNet, a deep learning approach that uses inertial readings and prior DVL data to estimate AUV velocity during isolated outages. In this work, we extend ST-BeamsNet to address prolonged DVL outages and evaluate its impact within an extended Kalman filter framework. Experiments demonstrate that the proposed framework improves velocity RMSE by up to 63% and reduces final position error by up to 95% compared to pure inertial navigation. This is in scenarios involving up to 50 seconds of complete DVL outage.
On Neural Inertial Classification Networks for Pedestrian Activity Recognition
Feb 23, 2025
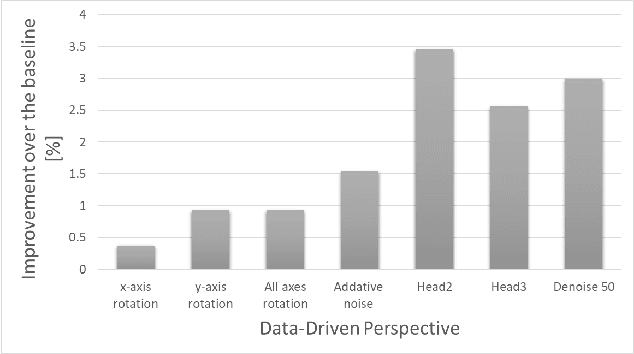
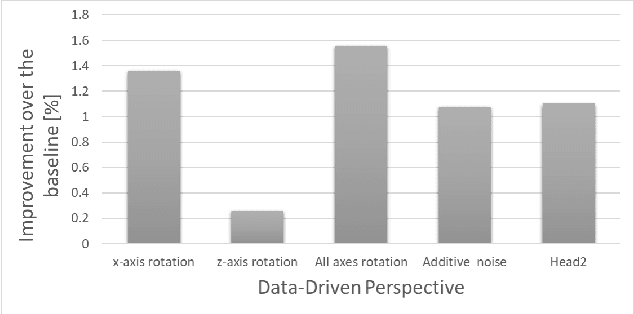
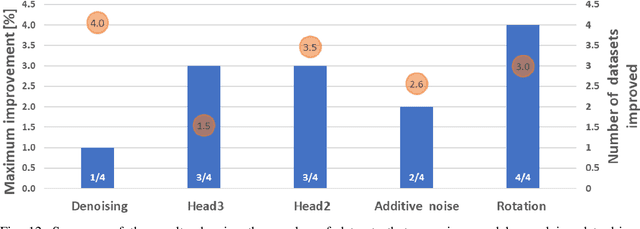
Inertial sensors are crucial for recognizing pedestrian activity. Recent advances in deep learning have greatly improved inertial sensing performance and robustness. Different domains and platforms use deep-learning techniques to enhance network performance, but there is no common benchmark. The latter is crucial for fair comparison and evaluation within a standardized framework. The aim of this paper is to fill this gap by defining and analyzing ten data-driven techniques for improving neural inertial classification networks. In order to accomplish this, we focused on three aspects of neural networks: network architecture, data augmentation, and data preprocessing. The experiments were conducted across four datasets collected from 78 participants. In total, over 936 minutes of inertial data sampled between 50-200Hz were analyzed. Data augmentation through rotation and multi-head architecture consistently yields the most significant improvements. Additionally, this study outlines benchmarking strategies for enhancing neural inertial classification networks.
Data-Driven Gyroscope Calibration
Oct 16, 2024Gyroscopes are inertial sensors that measure the angular velocity of the platforms to which they are attached. To estimate the gyroscope deterministic error terms prior mission start, a calibration procedure is performed. When considering low-cost gyroscopes, the calibration requires a turntable as the gyros are incapable of sensing the Earth turn rate. In this paper, we propose a data-driven framework to estimate the scale factor and bias of a gyroscope. To train and validate our approach, a dataset of 56 minutes was recorded using a turntable. We demonstrated that our proposed approach outperforms the model-based approach, in terms of accuracy and convergence time. Specifically, we improved the scale factor and bias estimation by an average of 72% during six seconds of calibration time, demonstrating an average of 75% calibration time improvement. That is, instead of minutes, our approach requires only several seconds for the calibration.
DCNet: A Data-Driven Framework for DVL
Oct 11, 2024



Autonomous underwater vehicles (AUVs) are underwater robotic platforms used in a variety of applications. An AUV's navigation solution relies heavily on the fusion of inertial sensors and Doppler velocity logs (DVL), where the latter delivers accurate velocity updates. To ensure accurate navigation, a DVL calibration is undertaken before the mission begins to estimate its error terms. During calibration, the AUV follows a complex trajectory and employs nonlinear estimation filters to estimate error terms. In this paper, we introduce DCNet, a data-driven framework that utilizes a two-dimensional convolution kernel in an innovative way. Using DCNet and our proposed DVL error model, we offer a rapid calibration procedure. This can be applied to a trajectory with a nearly constant velocity. To train and test our proposed approach a dataset of 276 minutes long with real DVL recorded measurements was used. We demonstrated an average improvement of 70% in accuracy and 80% improvement in calibration time, compared to the baseline approach, with a low-performance DVL. As a result of those improvements, an AUV employing a low-cost DVL, can achieve higher accuracy, shorter calibration time, and apply a simple nearly constant velocity calibration trajectory. Our results also open up new applications for marine robotics utilizing low-cost, high-accurate DVLs.
Multiple and Gyro-Free Inertial Datasets
Mar 21, 2024
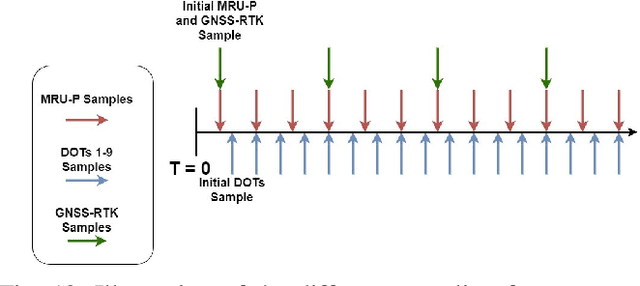
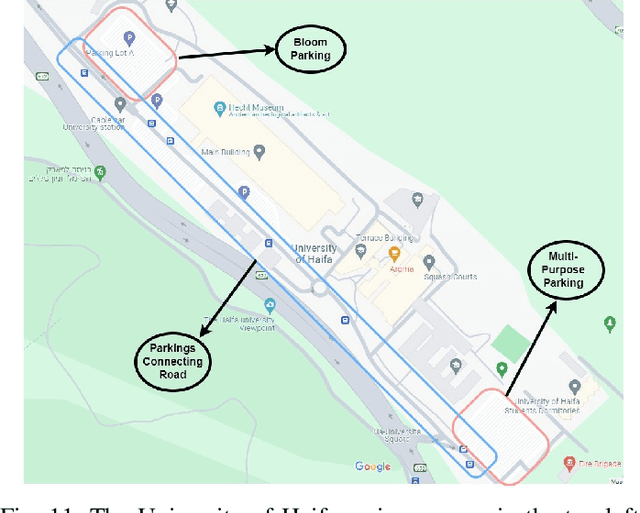
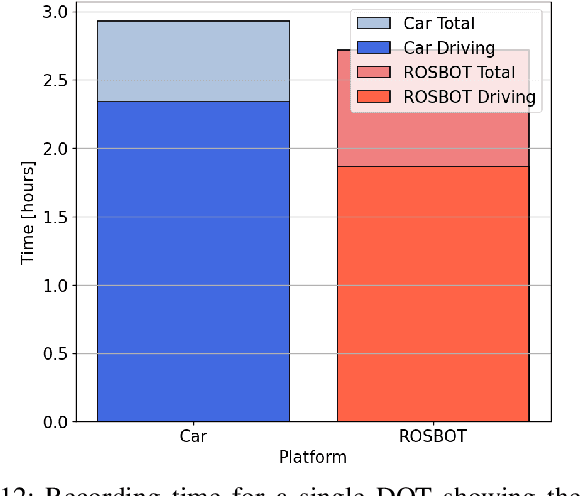
An inertial navigation system (INS) utilizes three orthogonal accelerometers and gyroscopes to determine platform position, velocity, and orientation. There are countless applications for INS, including robotics, autonomous platforms, and the internet of things. Recent research explores the integration of data-driven methods with INS, highlighting significant innovations, improving accuracy and efficiency. Despite the growing interest in this field and the availability of INS datasets, no datasets are available for gyro-free INS (GFINS) and multiple inertial measurement unit (MIMU) architectures. To fill this gap and to stimulate further research in this field, we designed and recorded GFINS and MIMU datasets using 54 inertial sensors grouped in nine inertial measurement units. These sensors can be used to define and evaluate different types of MIMU and GFINS architectures. The inertial sensors were arranged in three different sensor configurations and mounted on a mobile robot and a passenger car. In total, the dataset contains 35 hours of inertial data and corresponding ground truth trajectories. The data and code are freely accessible through our GitHub repository.
DVL Calibration using Data-driven Methods
Jan 23, 2024Autonomous underwater vehicles (AUVs) are used in a wide range of underwater applications, ranging from seafloor mapping to industrial operations. While underwater, the AUV navigation solution commonly relies on the fusion between inertial sensors and Doppler velocity logs (DVL). To achieve accurate DVL measurements a calibration procedure should be conducted before the mission begins. Model-based calibration approaches include filtering approaches utilizing global navigation satellite system signals. In this paper, we propose an end-to-end deep-learning framework for the calibration procedure. Using stimulative data, we show that our proposed approach outperforms model-based approaches by 35% in accuracy and 80% in the required calibration time.
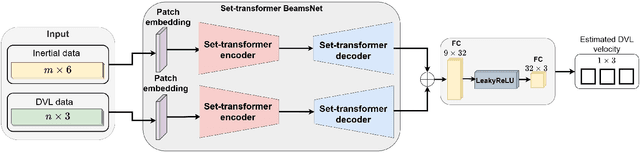
Set-Transformer BeamsNet for AUV Velocity Forecasting in Complete DVL Outage Scenarios
Dec 22, 2022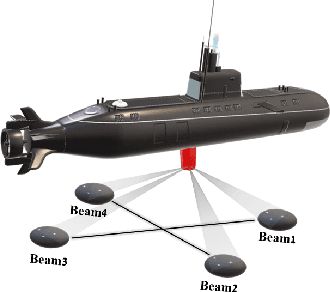
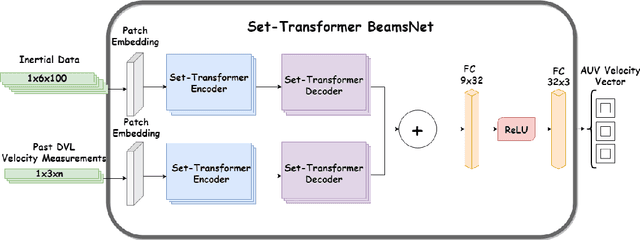
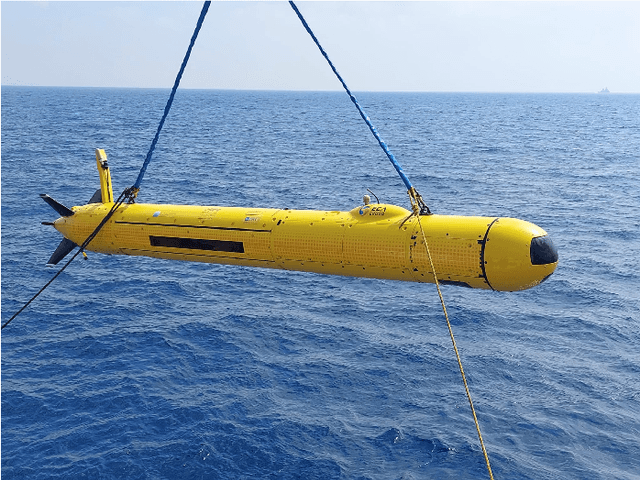
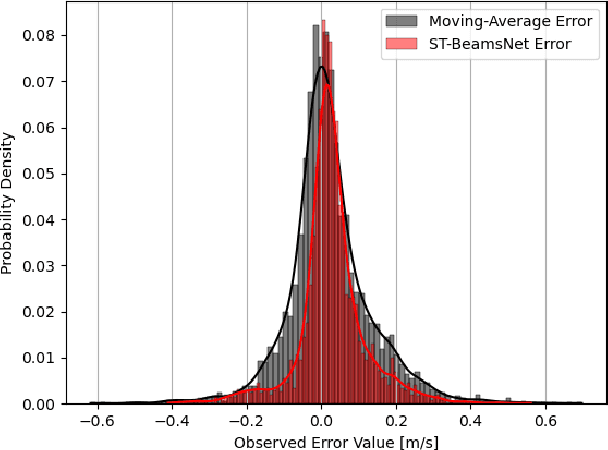
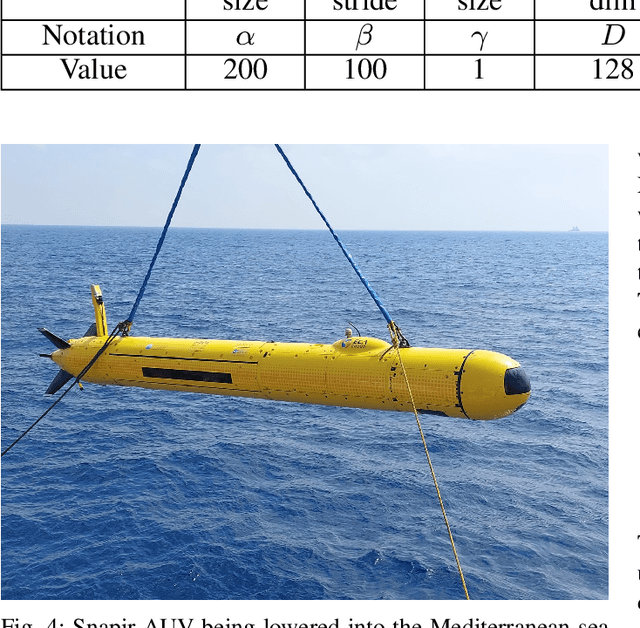
Autonomous underwater vehicles (AUVs) are regularly used for deep ocean applications. Commonly, the autonomous navigation task is carried out by a fusion between two sensors: the inertial navigation system and the Doppler velocity log (DVL). The DVL operates by transmitting four acoustic beams to the sea floor, and once reflected back, the AUV velocity vector can be estimated. However, in real-life scenarios, such as an uneven seabed, sea creatures blocking the DVL's view and, roll/pitch maneuvers, the acoustic beams' reflection is resulting in a scenario known as DVL outage. Consequently, a velocity update is not available to bind the inertial solution drift. To cope with such situations, in this paper, we leverage our BeamsNet framework and propose a Set-Transformer-based BeamsNet (ST-BeamsNet) that utilizes inertial data readings and previous DVL velocity measurements to regress the current AUV velocity in case of a complete DVL outage. The proposed approach was evaluated using data from experiments held in the Mediterranean Sea with the Snapir AUV and was compared to a moving average (MA) estimator. Our ST-BeamsNet estimated the AUV velocity vector with an 8.547% speed error, which is 26% better than the MA approach.