 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSet-Transformer BeamsNet for AUV Velocity Forecasting in Complete DVL Outage Scenarios
Paper and Code
Dec 22, 2022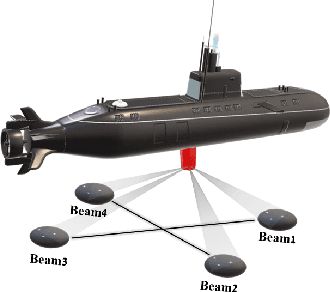
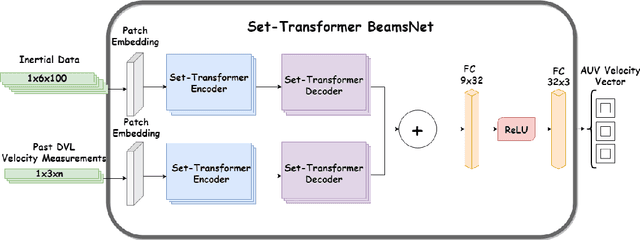
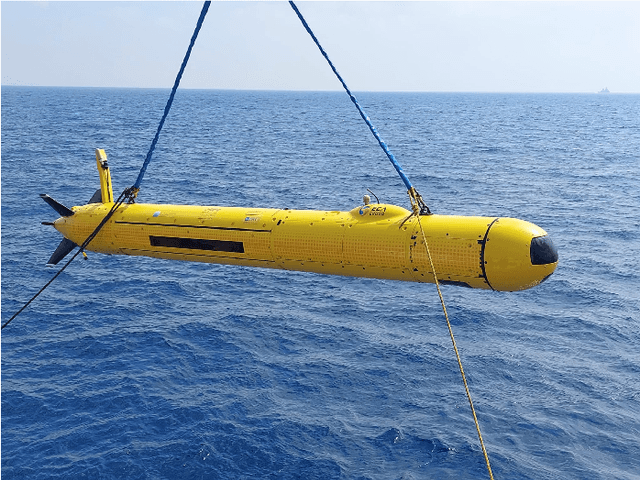
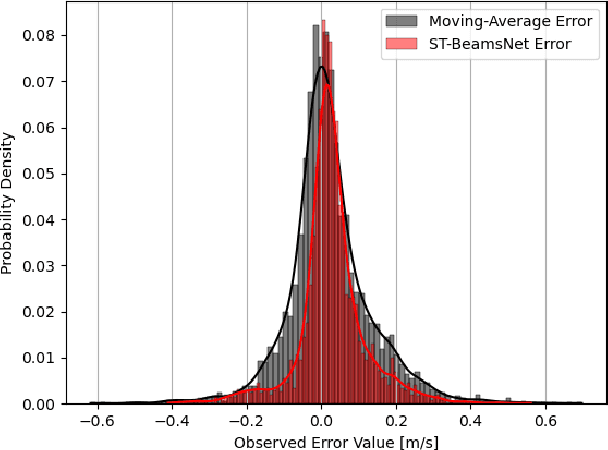
Autonomous underwater vehicles (AUVs) are regularly used for deep ocean applications. Commonly, the autonomous navigation task is carried out by a fusion between two sensors: the inertial navigation system and the Doppler velocity log (DVL). The DVL operates by transmitting four acoustic beams to the sea floor, and once reflected back, the AUV velocity vector can be estimated. However, in real-life scenarios, such as an uneven seabed, sea creatures blocking the DVL's view and, roll/pitch maneuvers, the acoustic beams' reflection is resulting in a scenario known as DVL outage. Consequently, a velocity update is not available to bind the inertial solution drift. To cope with such situations, in this paper, we leverage our BeamsNet framework and propose a Set-Transformer-based BeamsNet (ST-BeamsNet) that utilizes inertial data readings and previous DVL velocity measurements to regress the current AUV velocity in case of a complete DVL outage. The proposed approach was evaluated using data from experiments held in the Mediterranean Sea with the Snapir AUV and was compared to a moving average (MA) estimator. Our ST-BeamsNet estimated the AUV velocity vector with an 8.547% speed error, which is 26% better than the MA approach.