 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiple and Gyro-Free Inertial Datasets
Mar 21, 2024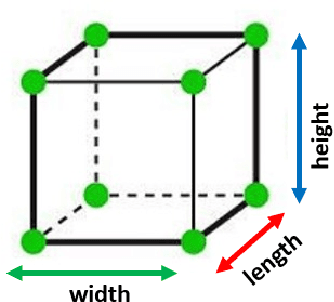
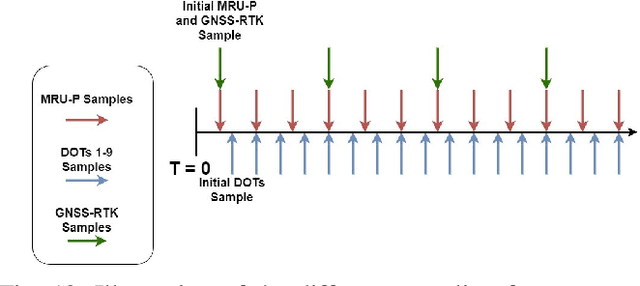
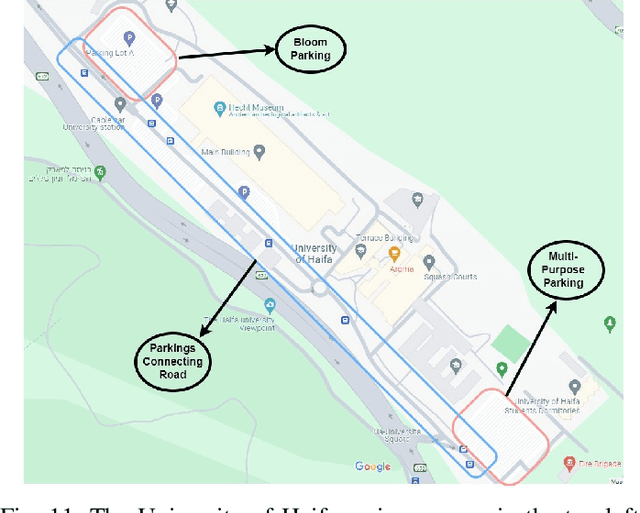
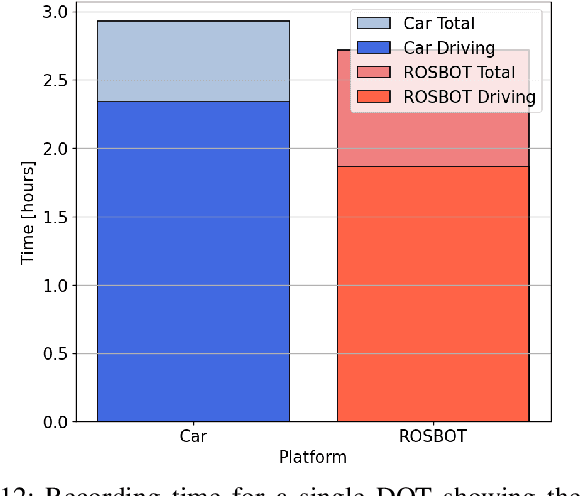
An inertial navigation system (INS) utilizes three orthogonal accelerometers and gyroscopes to determine platform position, velocity, and orientation. There are countless applications for INS, including robotics, autonomous platforms, and the internet of things. Recent research explores the integration of data-driven methods with INS, highlighting significant innovations, improving accuracy and efficiency. Despite the growing interest in this field and the availability of INS datasets, no datasets are available for gyro-free INS (GFINS) and multiple inertial measurement unit (MIMU) architectures. To fill this gap and to stimulate further research in this field, we designed and recorded GFINS and MIMU datasets using 54 inertial sensors grouped in nine inertial measurement units. These sensors can be used to define and evaluate different types of MIMU and GFINS architectures. The inertial sensors were arranged in three different sensor configurations and mounted on a mobile robot and a passenger car. In total, the dataset contains 35 hours of inertial data and corresponding ground truth trajectories. The data and code are freely accessible through our GitHub repository.
VIO-DualProNet: Visual-Inertial Odometry with Learning Based Process Noise Covariance
Aug 22, 2023



Visual-inertial odometry (VIO) is a vital technique used in robotics, augmented reality, and autonomous vehicles. It combines visual and inertial measurements to accurately estimate position and orientation. Existing VIO methods assume a fixed noise covariance for the inertial uncertainty. However, accurately determining in real-time the noise variance of the inertial sensors presents a significant challenge as the uncertainty changes throughout the operation leading to suboptimal performance and reduced accuracy. To circumvent this, we propose VIO-DualProNet, a novel approach that utilizes deep learning methods to dynamically estimate the inertial noise uncertainty in real-time. By designing and training a deep neural network to predict inertial noise uncertainty using only inertial sensor measurements, and integrating it into the VINS-Mono algorithm, we demonstrate a substantial improvement in accuracy and robustness, enhancing VIO performance and potentially benefiting other VIO-based systems for precise localization and mapping across diverse conditions.