 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAUV Acceleration Prediction Using DVL and Deep Learning
Mar 20, 2025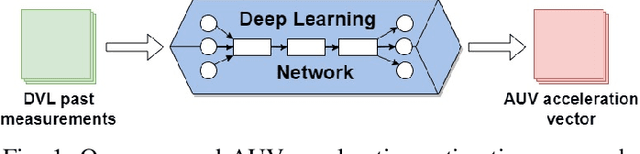
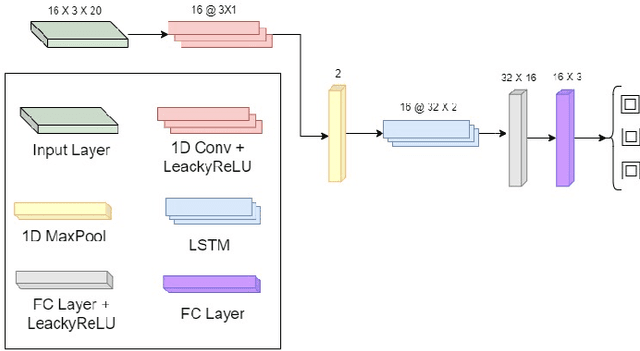


Autonomous underwater vehicles (AUVs) are essential for various applications, including oceanographic surveys, underwater mapping, and infrastructure inspections. Accurate and robust navigation are critical to completing these tasks. To this end, a Doppler velocity log (DVL) and inertial sensors are fused together. Recently, a model-based approach demonstrated the ability to extract the vehicle acceleration vector from DVL velocity measurements. Motivated by this advancement, in this paper we present an end-to-end deep learning approach to estimate the AUV acceleration vector based on past DVL velocity measurements. Based on recorded data from sea experiments, we demonstrate that the proposed method improves acceleration vector estimation by more than 65% compared to the model-based approach by using data-driven techniques. As a result of our data-driven approach, we can enhance navigation accuracy and reliability in AUV applications, contributing to more efficient and effective underwater missions through improved accuracy and reliability.
Rapid Gyroscope Calibration: A Deep Learning Approach
Aug 31, 2024Low-cost gyroscope calibration is essential for ensuring the accuracy and reliability of gyroscope measurements. Stationary calibration estimates the deterministic parts of measurement errors. To this end, a common practice is to average the gyroscope readings during a predefined period and estimate the gyroscope bias. Calibration duration plays a crucial role in performance, therefore, longer periods are preferred. However, some applications require quick startup times and calibration is therefore allowed only for a short time. In this work, we focus on reducing low-cost gyroscope calibration time using deep learning methods. We propose a deep-learning framework and explore the possibilities of using multiple real and virtual gyroscopes to improve the calibration performance of single gyroscopes. To train and validate our approach, we recorded a dataset consisting of 169 hours of gyroscope readings, using 24 gyroscopes of two different brands. We also created a virtual dataset consisting of simulated gyroscope readings. The two datasets were used to evaluate our proposed approach. One of our key achievements in this work is reducing gyroscope calibration time by up to 89% using three low-cost gyroscopes.
Multiple and Gyro-Free Inertial Datasets
Mar 21, 2024
An inertial navigation system (INS) utilizes three orthogonal accelerometers and gyroscopes to determine platform position, velocity, and orientation. There are countless applications for INS, including robotics, autonomous platforms, and the internet of things. Recent research explores the integration of data-driven methods with INS, highlighting significant innovations, improving accuracy and efficiency. Despite the growing interest in this field and the availability of INS datasets, no datasets are available for gyro-free INS (GFINS) and multiple inertial measurement unit (MIMU) architectures. To fill this gap and to stimulate further research in this field, we designed and recorded GFINS and MIMU datasets using 54 inertial sensors grouped in nine inertial measurement units. These sensors can be used to define and evaluate different types of MIMU and GFINS architectures. The inertial sensors were arranged in three different sensor configurations and mounted on a mobile robot and a passenger car. In total, the dataset contains 35 hours of inertial data and corresponding ground truth trajectories. The data and code are freely accessible through our GitHub repository.