 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoc4Plan: Locating Before Planning for Outdoor Vision and Language Navigation
Aug 09, 2024



Vision and Language Navigation (VLN) is a challenging task that requires agents to understand instructions and navigate to the destination in a visual environment.One of the key challenges in outdoor VLN is keeping track of which part of the instruction was completed. To alleviate this problem, previous works mainly focus on grounding the natural language to the visual input, but neglecting the crucial role of the agent's spatial position information in the grounding process. In this work, we first explore the substantial effect of spatial position locating on the grounding of outdoor VLN, drawing inspiration from human navigation. In real-world navigation scenarios, before planning a path to the destination, humans typically need to figure out their current location. This observation underscores the pivotal role of spatial localization in the navigation process. In this work, we introduce a novel framework, Locating be for Planning (Loc4Plan), designed to incorporate spatial perception for action planning in outdoor VLN tasks. The main idea behind Loc4Plan is to perform the spatial localization before planning a decision action based on corresponding guidance, which comprises a block-aware spatial locating (BAL) module and a spatial-aware action planning (SAP) module. Specifically, to help the agent perceive its spatial location in the environment, we propose to learn a position predictor that measures how far the agent is from the next intersection for reflecting its position, which is achieved by the BAL module. After the locating process, we propose the SAP module to incorporate spatial information to ground the corresponding guidance and enhance the precision of action planning. Extensive experiments on the Touchdown and map2seq datasets show that the proposed Loc4Plan outperforms the SOTA methods.
Predictions of 2019-nCoV Transmission Ending via Comprehensive Methods
Feb 20, 2020
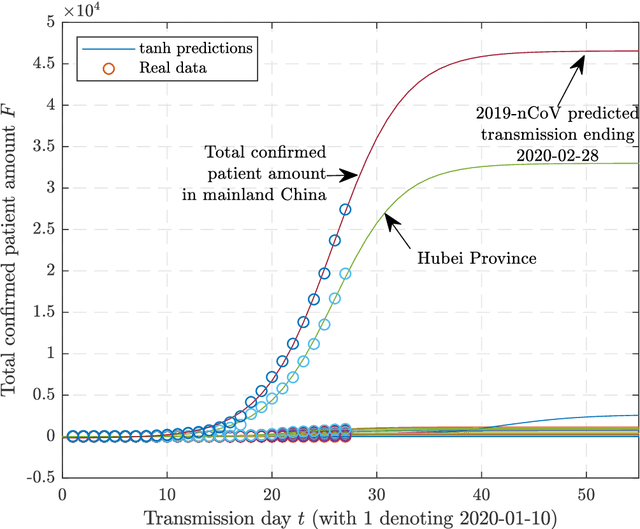

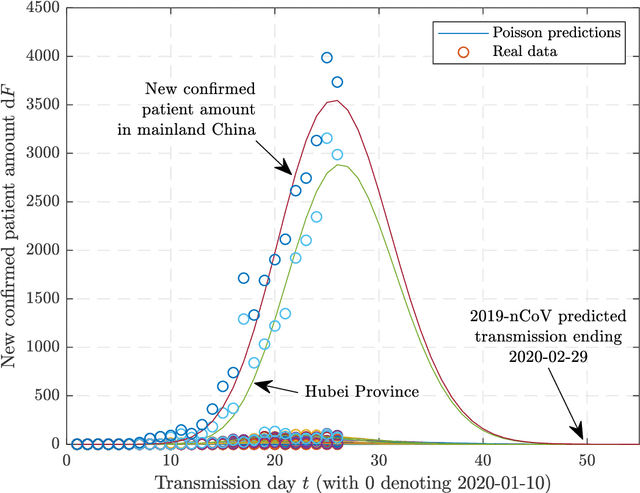
Since the SARS outbreak in 2003, a lot of predictive epidemiological models have been proposed. At the end of 2019, a novel coronavirus, termed as 2019-nCoV, has broken out and is propagating in China and the world. Here we propose a multi-model ordinary differential equation set neural network (MMODEs-NN) and model-free methods to predict the interprovincial transmissions in mainland China, especially those from Hubei Province. Compared with the previously proposed epidemiological models, the proposed network can simulate the transportations with the ODEs activation method, while the model-free methods based on the sigmoid function, Gaussian function, and Poisson distribution are linear and fast to generate reasonable predictions. According to the numerical experiments and the realities, the special policies for controlling the disease are successful in some provinces, and the transmission of the epidemic, whose outbreak time is close to the beginning of China Spring Festival travel rush, is more likely to decelerate before February 18 and to end before April 2020. The proposed mathematical and artificial intelligence methods can give consistent and reasonable predictions of the 2019-nCoV ending. We anticipate our work to be a starting point for comprehensive prediction researches of the 2019-nCoV.