 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFire-Image-DenseNet (FIDN) for predicting wildfire burnt area using remote sensing data
Dec 02, 2024



Predicting the extent of massive wildfires once ignited is essential to reduce the subsequent socioeconomic losses and environmental damage, but challenging because of the complexity of fire behaviour. Existing physics-based models are limited in predicting large or long-duration wildfire events. Here, we develop a deep-learning-based predictive model, Fire-Image-DenseNet (FIDN), that uses spatial features derived from both near real-time and reanalysis data on the environmental and meteorological drivers of wildfire. We trained and tested this model using more than 300 individual wildfires that occurred between 2012 and 2019 in the western US. In contrast to existing models, the performance of FIDN does not degrade with fire size or duration. Furthermore, it predicts final burnt area accurately even in very heterogeneous landscapes in terms of fuel density and flammability. The FIDN model showed higher accuracy, with a mean squared error (MSE) about 82% and 67% lower than those of the predictive models based on cellular automata (CA) and the minimum travel time (MTT) approaches, respectively. Its structural similarity index measure (SSIM) averages 97%, outperforming the CA and FlamMap MTT models by 6% and 2%, respectively. Additionally, FIDN is approximately three orders of magnitude faster than both CA and MTT models. The enhanced computational efficiency and accuracy advancements offer vital insights for strategic planning and resource allocation for firefighting operations.
Mapping Walnut Water Stress with High Resolution Multispectral UAV Imagery and Machine Learning
Jan 10, 2024Effective monitoring of walnut water status and stress level across the whole orchard is an essential step towards precision irrigation management of walnuts, a significant crop in California. This study presents a machine learning approach using Random Forest (RF) models to map stem water potential (SWP) by integrating high-resolution multispectral remote sensing imagery from Unmanned Aerial Vehicle (UAV) flights with weather data. From 2017 to 2018, five flights of an UAV equipped with a seven-band multispectral camera were conducted over a commercial walnut orchard, paired with concurrent ground measurements of sampled walnut plants. The RF regression model, utilizing vegetation indices derived from orthomosaiced UAV imagery and weather data, effectively estimated ground-measured SWPs, achieving an $R^2$ of 0.63 and a mean absolute error (MAE) of 0.80 bars. The integration of weather data was particularly crucial for consolidating data across various flight dates. Significant variables for SWP estimation included wind speed and vegetation indices such as NDVI, NDRE, and PSRI.A reduced RF model excluding red-edge indices of NDRE and PSRI, demonstrated slightly reduced accuracy ($R^2$ = 0.54). Additionally, the RF classification model predicted water stress levels in walnut trees with 85% accuracy, surpassing the 80% accuracy of the reduced classification model. The results affirm the efficacy of UAV-based multispectral imaging combined with machine learning, incorporating thermal data, NDVI, red-edge indices, and weather data, in walnut water stress estimation and assessment. This methodology offers a scalable, cost-effective tool for data-driven precision irrigation management at an individual plant level in walnut orchards.
EVE: Environmental Adaptive Neural Network Models for Low-power Energy Harvesting System
Jul 14, 2022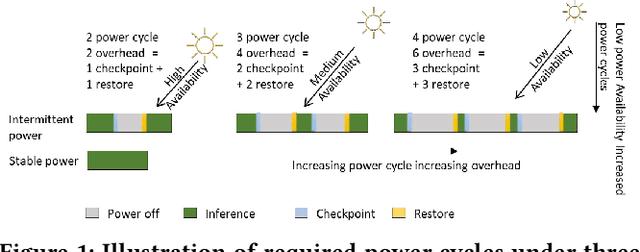
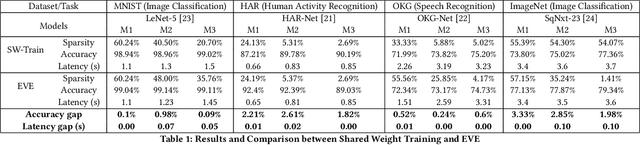
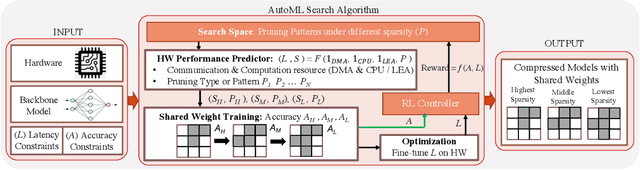
IoT devices are increasingly being implemented with neural network models to enable smart applications. Energy harvesting (EH) technology that harvests energy from ambient environment is a promising alternative to batteries for powering those devices due to the low maintenance cost and wide availability of the energy sources. However, the power provided by the energy harvester is low and has an intrinsic drawback of instability since it varies with the ambient environment. This paper proposes EVE, an automated machine learning (autoML) co-exploration framework to search for desired multi-models with shared weights for energy harvesting IoT devices. Those shared models incur significantly reduced memory footprint with different levels of model sparsity, latency, and accuracy to adapt to the environmental changes. An efficient on-device implementation architecture is further developed to efficiently execute each model on device. A run-time model extraction algorithm is proposed that retrieves individual model with negligible overhead when a specific model mode is triggered. Experimental results show that the neural networks models generated by EVE is on average 2.5X times faster than the baseline models without pruning and shared weights.