 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Stability Connection Between Discrete-Time Algorithms and Their Resolution ODEs: Applications to Min-Max Optimisation
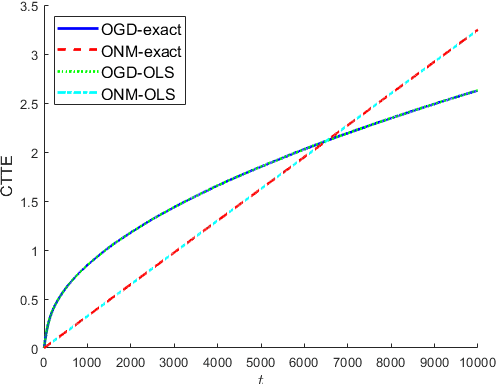
Mar 02, 2026This work establishes a rigorous connection between stability properties of discrete-time algorithms (DTAs) and corresponding continuous-time dynamical systems derived through $ O(s^r) $-resolution ordinary differential equations (ODEs). We show that for discrete- and continuous-time dynamical systems satisfying a mild error assumption, exponential stability of a common equilibrium with respect to the continuous time dynamics implies exponential stability of the corresponding equilibrium for the discrete-time dynamics, provided that the step size is chosen sufficiently small. We extend this result to common compact invariant sets. We prove that if an equilibrium is exponentially stable for the $ O(s^r) $-resolution ODE, then it is also exponentially stable for the associated DTA. We apply this framework to analyse the limit point properties of several prominent optimisation algorithms, including Two-Timescale Gradient Descent--Ascent (TT-GDA), Generalised Extragradient (GEG), Two-Timescale Proximal Point (TT-PPM), Damped Newton (DN), Regularised Damped Newton (RDN), and the Jacobian method (JM), by studying their $ O(1) $- and $ O(s) $-resolution ODEs. We show that under a proper choice of hyperparameters, the set of saddle points of the objective function is a subset of the set of exponentially stable equilibria of GEG, TT-PPM, DN, and RDN. We relax the common Hessian invariance assumption through direct analysis of the resolution ODEs, broadening the applicability of our results. Numerical examples illustrate the theoretical findings.
Solving the Offline and Online Min-Max Problem of Non-smooth Submodular-Concave Functions: A Zeroth-Order Approach
Jan 29, 2026We consider max-min and min-max problems with objective functions that are possibly non-smooth, submodular with respect to the minimiser and concave with respect to the maximiser. We investigate the performance of a zeroth-order method applied to this problem. The method is based on the subgradient of the Lovász extension of the objective function with respect to the minimiser and based on Gaussian smoothing to estimate the smoothed function gradient with respect to the maximiser. In expectation sense, we prove the convergence of the algorithm to an $ε$-saddle point in the offline case. Moreover, we show that, in the expectation sense, in the online setting, the algorithm achieves $O(\sqrt{N\bar{P}_N})$ online duality gap, where $N$ is the number of iterations and $\bar{P}_N$ is the path length of the sequence of optimal decisions. The complexity analysis and hyperparameter selection are presented for all the cases. The theoretical results are illustrated via numerical examples.
Schedulers for Schedule-free: Theoretically inspired hyperparameters
Nov 11, 2025The recently proposed schedule-free method has been shown to achieve strong performance when hyperparameter tuning is limited. The current theory for schedule-free only supports a constant learning rate, where-as the implementation used in practice uses a warm-up schedule. We show how to extend the last-iterate convergence theory of schedule-free to allow for any scheduler, and how the averaging parameter has to be updated as a function of the learning rate. We then perform experiments showing how our convergence theory has some predictive power with regards to practical executions on deep neural networks, despite that this theory relies on assuming convexity. When applied to the warmup-stable-decay (wsd) schedule, our theory shows the optimal convergence rate of $\mathcal{O}(1/\sqrt{T})$. We then use convexity to design a new adaptive Polyak learning rate schedule for schedule-free. We prove an optimal anytime last-iterate convergence for our new Polyak schedule, and show that it performs well compared to a number of baselines on a black-box model distillation task.
Minimisation of Quasar-Convex Functions Using Random Zeroth-Order Oracles
May 04, 2025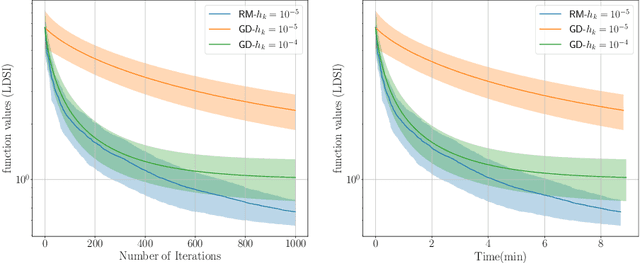
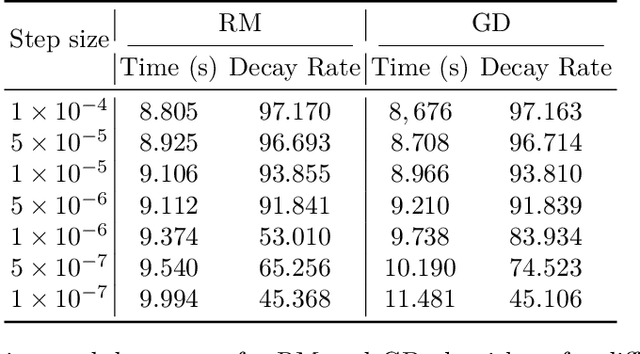
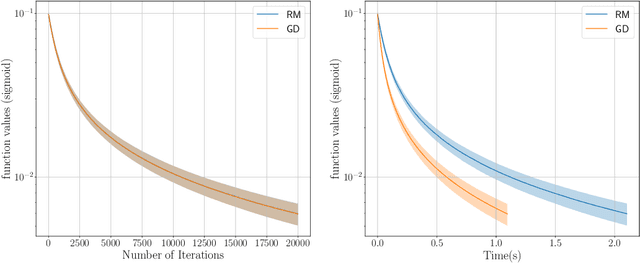
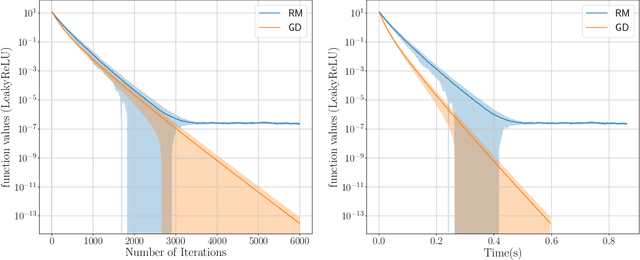
This study explores the performance of a random Gaussian smoothing zeroth-order (ZO) scheme for minimising quasar-convex (QC) and strongly quasar-convex (SQC) functions in both unconstrained and constrained settings. For the unconstrained problem, we establish the ZO algorithm's convergence to a global minimum along with its complexity when applied to both QC and SQC functions. For the constrained problem, we introduce the new notion of proximal-quasar-convexity and prove analogous results to the unconstrained case. Specifically, we show the complexity bounds and the convergence of the algorithm to a neighbourhood of a global minimum whose size can be controlled under a variance reduction scheme. Theoretical findings are illustrated through investigating the performance of the algorithm applied to a range of problems in machine learning and optimisation. Specifically, we observe scenarios where the ZO method outperforms gradient descent. We provide a possible explanation for this phenomenon.
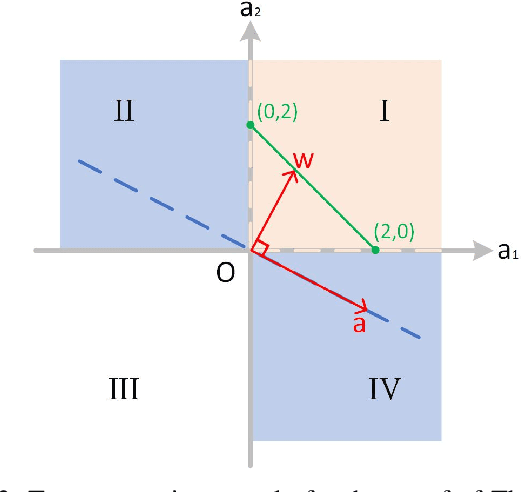
Properties of Fixed Points of Generalised Extra Gradient Methods Applied to Min-Max Problems
Apr 03, 2025This paper studies properties of fixed points of generalised Extra-gradient (GEG) algorithms applied to min-max problems. We discuss connections between saddle points of the objective function of the min-max problem and GEG fixed points. We show that, under appropriate step-size selections, the set of saddle points (Nash equilibria) is a subset of stable fixed points of GEG. Convergence properties of the GEG algorithm are obtained through a stability analysis of a discrete-time dynamical system. The results and benefits when compared to existing methods are illustrated through numerical examples.
Online Non-Stationary Stochastic Quasar-Convex Optimization
Jul 04, 2024

Recent research has shown that quasar-convexity can be found in applications such as identification of linear dynamical systems and generalized linear models. Such observations have in turn spurred exciting developments in design and analysis algorithms that exploit quasar-convexity. In this work, we study the online stochastic quasar-convex optimization problems in a dynamic environment. We establish regret bounds of online gradient descent in terms of cumulative path variation and cumulative gradient variance for losses satisfying quasar-convexity and strong quasar-convexity. We then apply the results to generalized linear models (GLM) when the underlying parameter is time-varying. We establish regret bounds of online gradient descent when applying to GLMs with leaky ReLU activation function, logistic activation function, and ReLU activation function. Numerical results are presented to corroborate our findings.
Distributionally Time-Varying Online Stochastic Optimization under Polyak-Łojasiewicz Condition with Application in Conditional Value-at-Risk Statistical Learning
Sep 18, 2023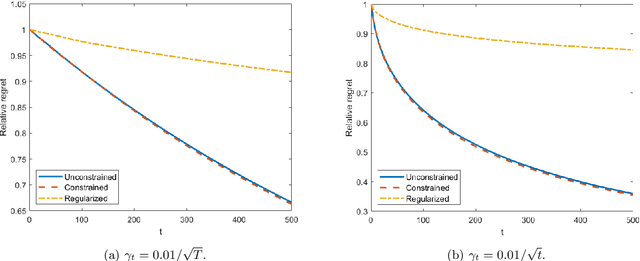
In this work, we consider a sequence of stochastic optimization problems following a time-varying distribution via the lens of online optimization. Assuming that the loss function satisfies the Polyak-{\L}ojasiewicz condition, we apply online stochastic gradient descent and establish its dynamic regret bound that is composed of cumulative distribution drifts and cumulative gradient biases caused by stochasticity. The distribution metric we adopt here is Wasserstein distance, which is well-defined without the absolute continuity assumption or with a time-varying support set. We also establish a regret bound of online stochastic proximal gradient descent when the objective function is regularized. Moreover, we show that the above framework can be applied to the Conditional Value-at-Risk (CVaR) learning problem. Particularly, we improve an existing proof on the discovery of the PL condition of the CVaR problem, resulting in a regret bound of online stochastic gradient descent.
Local Strong Convexity of Source Localization and Error Bound for Target Tracking under Time-of-Arrival Measurements
Dec 21, 2021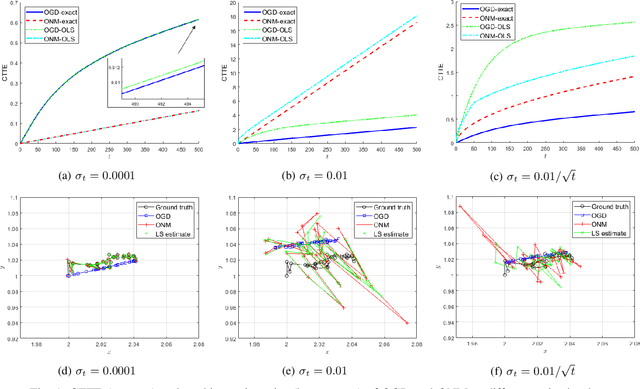
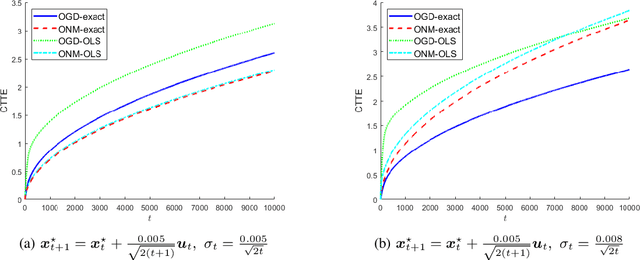
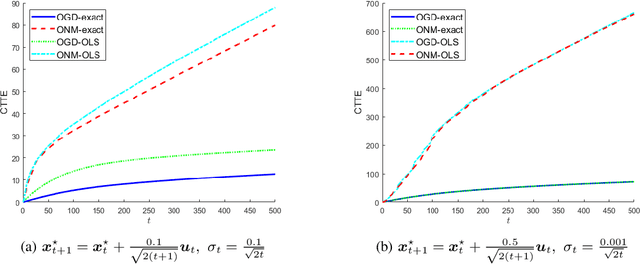
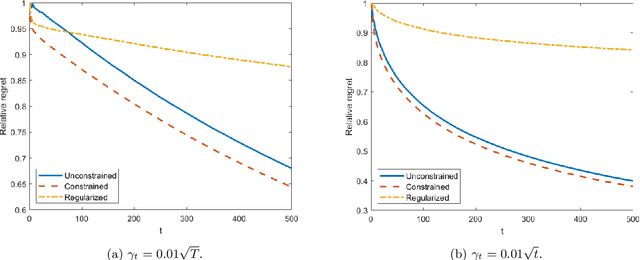
In this paper, we consider a time-varying optimization approach to the problem of tracking a moving target using noisy time-of-arrival (TOA) measurements. Specifically, we formulate the problem as that of sequential TOA-based source localization and apply online gradient descent (OGD) to it to generate the position estimates of the target. To analyze the tracking performance of OGD, we first revisit the classic least-squares formulation of the (static) TOA-based source localization problem and elucidate its estimation and geometric properties. In particular, under standard assumptions on the TOA measurement model, we establish a bound on the distance between an optimal solution to the least-squares formulation and the true target position. Using this bound, we show that the loss function in the formulation, albeit non-convex in general, is locally strongly convex at its global minima. To the best of our knowledge, these results are new and can be of independent interest. By combining them with existing techniques from online strongly convex optimization, we then establish the first non-trivial bound on the cumulative target tracking error of OGD. Our numerical results corroborate the theoretical findings and show that OGD can effectively track the target at different noise levels.
Learning Graphs from Smooth Signals under Moment Uncertainty
May 12, 2021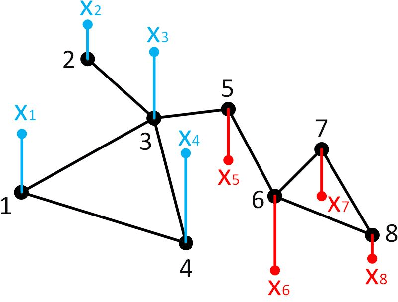
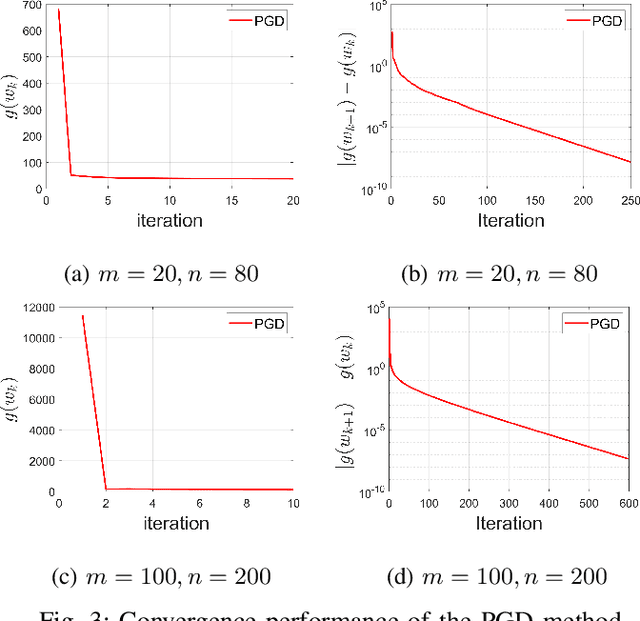
We consider the problem of inferring the graph structure from a given set of smooth graph signals. The number of perceived graph signals is always finite and possibly noisy, thus the statistical properties of the data distribution is ambiguous. Traditional graph learning models do not take this distributional uncertainty into account, thus performance may be sensitive to different sets of data. In this paper, we propose a distributionally robust approach to graph learning, which incorporates the first and second moment uncertainty into the smooth graph learning model. Specifically, we cast our graph learning model as a minimax optimization problem, and further reformulate it as a nonconvex minimization problem with linear constraints. In our proposed formulation, we find a theoretical interpretation of the Laplacian regularizer, which is adopted in many existing works in an intuitive manner. Although the first moment uncertainty leads to an annoying square root term in the objective function, we prove that it enjoys the smoothness property with probability 1 over the entire constraint. We develop a efficient projected gradient descent (PGD) method and establish its global iterate convergence to a critical point. We conduct extensive experiments on both synthetic and real data to verify the effectiveness of our model and the efficiency of the PGD algorithm. Compared with the state-of-the-art smooth graph learning methods, our approach exhibits superior and more robust performance across different populations of signals in terms of various evaluation metrics.