 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFour Principles for Physically Interpretable World Models
Mar 04, 2025


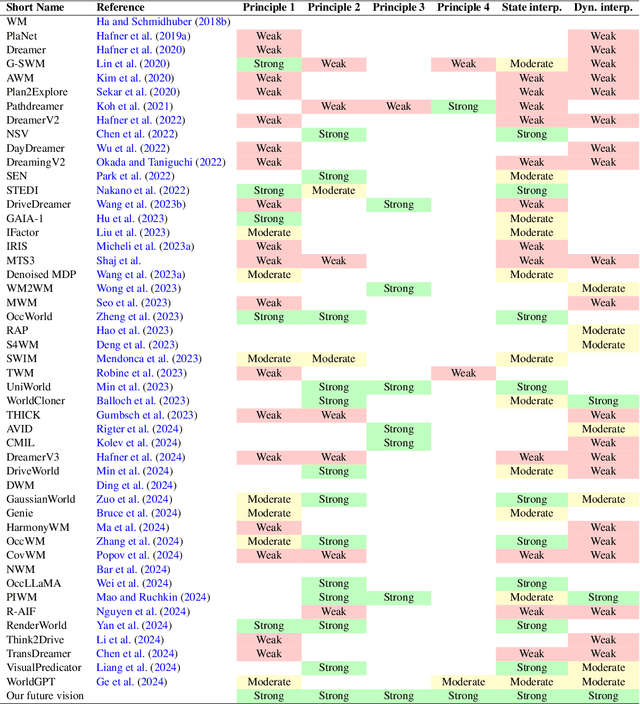
As autonomous systems are increasingly deployed in open and uncertain settings, there is a growing need for trustworthy world models that can reliably predict future high-dimensional observations. The learned latent representations in world models lack direct mapping to meaningful physical quantities and dynamics, limiting their utility and interpretability in downstream planning, control, and safety verification. In this paper, we argue for a fundamental shift from physically informed to physically interpretable world models - and crystallize four principles that leverage symbolic knowledge to achieve these ends: (1) structuring latent spaces according to the physical intent of variables, (2) learning aligned invariant and equivariant representations of the physical world, (3) adapting training to the varied granularity of supervision signals, and (4) partitioning generative outputs to support scalability and verifiability. We experimentally demonstrate the value of each principle on two benchmarks. This paper opens several intriguing research directions to achieve and capitalize on full physical interpretability in world models.
Zero-shot Safety Prediction for Autonomous Robots with Foundation World Models
Apr 02, 2024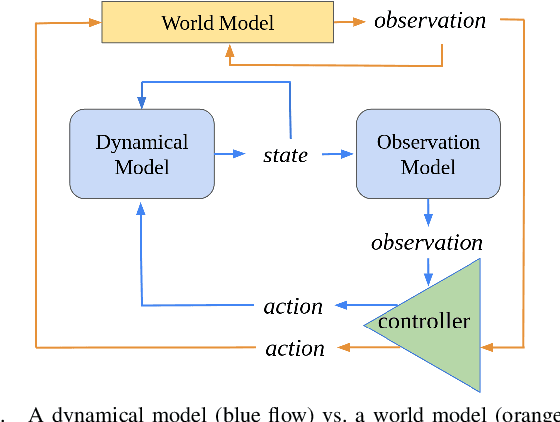



A world model creates a surrogate world to train a controller and predict safety violations by learning the internal dynamic model of systems. However, the existing world models rely solely on statistical learning of how observations change in response to actions, lacking precise quantification of how accurate the surrogate dynamics are, which poses a significant challenge in safety-critical systems. To address this challenge, we propose foundation world models that embed observations into meaningful and causally latent representations. This enables the surrogate dynamics to directly predict causal future states by leveraging a training-free large language model. In two common benchmarks, this novel model outperforms standard world models in the safety prediction task and has a performance comparable to supervised learning despite not using any data. We evaluate its performance with a more specialized and system-relevant metric by comparing estimated states instead of aggregating observation-wide error.
Bridging Dimensions: Confident Reachability for High-Dimensional Controllers
Nov 08, 2023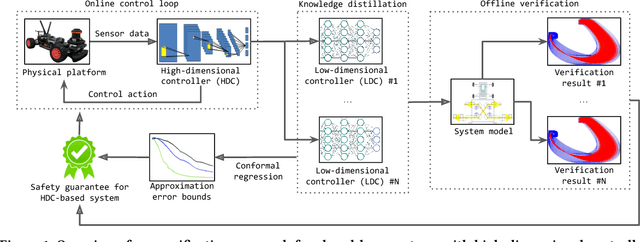
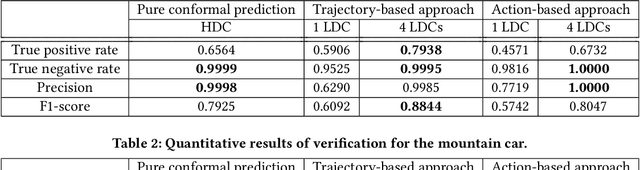
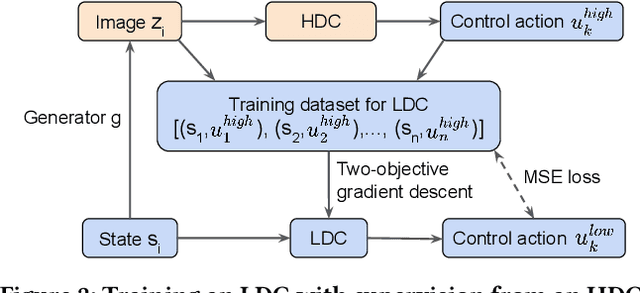
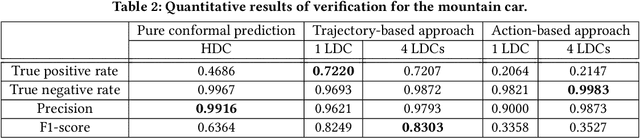
Autonomous systems are increasingly implemented using end-end-end trained controllers. Such controllers make decisions that are executed on the real system with images as one of the primary sensing modalities. Deep neural networks form a fundamental building block of such controllers. Unfortunately, the existing neural-network verification tools do not scale to inputs with thousands of dimensions. Especially when the individual inputs (such as pixels) are devoid of clear physical meaning. This paper takes a step towards connecting exhaustive closed-loop verification with high-dimensional controllers. Our key insight is that the behavior of a high-dimensional controller can be approximated with several low-dimensional controllers in different regions of the state space. To balance approximation and verifiability, we leverage the latest verification-aware knowledge distillation. Then, if low-dimensional reachability results are inflated with statistical approximation errors, they yield a high-confidence reachability guarantee for the high-dimensional controller. We investigate two inflation techniques -- based on trajectories and actions -- both of which show convincing performance in two OpenAI gym benchmarks.