 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMitigating the Curse of Dimensionality for Certified Robustness via Dual Randomized Smoothing
Apr 15, 2024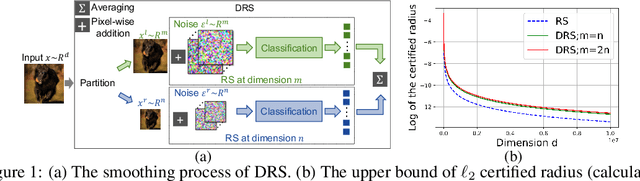
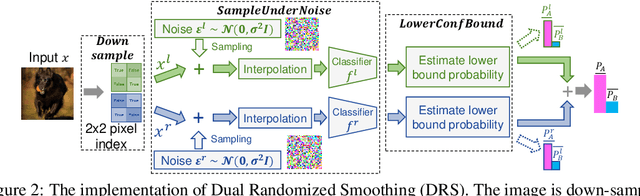
Randomized Smoothing (RS) has been proven a promising method for endowing an arbitrary image classifier with certified robustness. However, the substantial uncertainty inherent in the high-dimensional isotropic Gaussian noise imposes the curse of dimensionality on RS. Specifically, the upper bound of ${\ell_2}$ certified robustness radius provided by RS exhibits a diminishing trend with the expansion of the input dimension $d$, proportionally decreasing at a rate of $1/\sqrt{d}$. This paper explores the feasibility of providing ${\ell_2}$ certified robustness for high-dimensional input through the utilization of dual smoothing in the lower-dimensional space. The proposed Dual Randomized Smoothing (DRS) down-samples the input image into two sub-images and smooths the two sub-images in lower dimensions. Theoretically, we prove that DRS guarantees a tight ${\ell_2}$ certified robustness radius for the original input and reveal that DRS attains a superior upper bound on the ${\ell_2}$ robustness radius, which decreases proportionally at a rate of $(1/\sqrt m + 1/\sqrt n )$ with $m+n=d$. Extensive experiments demonstrate the generalizability and effectiveness of DRS, which exhibits a notable capability to integrate with established methodologies, yielding substantial improvements in both accuracy and ${\ell_2}$ certified robustness baselines of RS on the CIFAR-10 and ImageNet datasets. Code is available at https://github.com/xiasong0501/DRS.
Point2RBox: Combine Knowledge from Synthetic Visual Patterns for End-to-end Oriented Object Detection with Single Point Supervision
Nov 23, 2023With the rapidly increasing demand for oriented object detection (OOD), recent research involving weakly-supervised detectors for learning rotated box (RBox) from the horizontal box (HBox) has attracted more and more attention. In this paper, we explore a more challenging yet label-efficient setting, namely single point-supervised OOD, and present our approach called Point2RBox. Specifically, we propose to leverage two principles: 1) Synthetic pattern knowledge combination: By sampling around each labelled point on the image, we transfer the object feature to synthetic visual patterns with the known bounding box to provide the knowledge for box regression. 2) Transform self-supervision: With a transformed input image (e.g. scaled/rotated), the output RBoxes are trained to follow the same transformation so that the network can perceive the relative size/rotation between objects. The detector is further enhanced by a few devised techniques to cope with peripheral issues, e.g. the anchor/layer assignment as the size of the object is not available in our point supervision setting. To our best knowledge, Point2RBox is the first end-to-end solution for point-supervised OOD. In particular, our method uses a lightweight paradigm, yet it achieves a competitive performance among point-supervised alternatives, 41.05%/27.62%/80.01% on DOTA/DIOR/HRSC datasets.
Operating Envelopes under Probabilistic Electricity Demand and Solar Generation Forecasts
Jul 20, 2022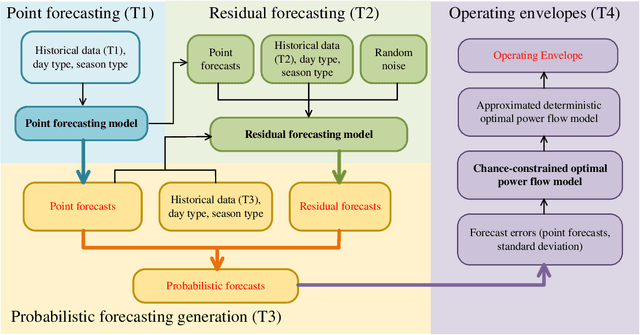


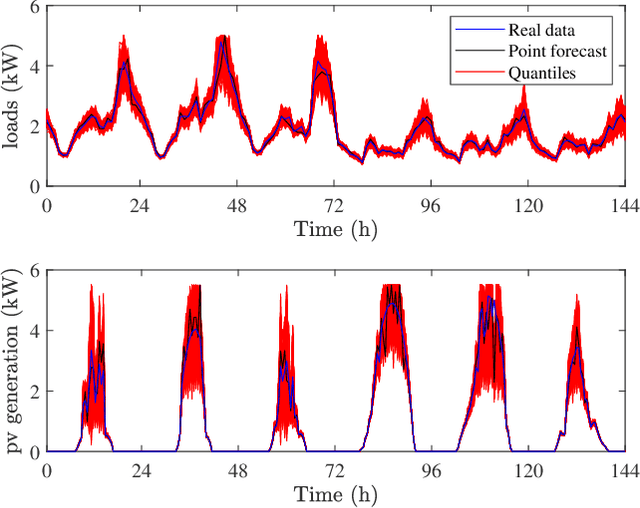
The increasing penetration of distributed energy resources in low-voltage networks is turning end-users from consumers to prosumers. However, the incomplete smart meter rollout and paucity of smart meter data due to the regulatory separation between retail and network service provision make active distribution network management difficult. Furthermore, distribution network operators oftentimes do not have access to real-time smart meter data, which creates an additional challenge. For the lack of better solutions, they use blanket rooftop solar export limits, leading to suboptimal outcomes. To address this, we designed a conditional generative adversarial network (CGAN)-based model to forecast household solar generation and electricity demand, which serves as an input to chance-constrained optimal power flow used to compute fair operating envelopes under uncertainty.