 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinematics-Based Sensor Fault Detection for Autonomous Vehicles Using Real-Time Numerical Differentiation
Sep 10, 2023



Sensor fault detection is of extreme importance for ensuring the safe operation of vehicles. This paper introduces a novel approach to detecting and identifying faulty sensors. For ground vehicles confined to the horizontal plane, this technique is based on six kinematics-based error metrics that are computed in real time by using onboard sensor data encompassing compass, radar, rate gyro, and accelerometer measurements as well as their derivatives. Real-time numerical differentiation is performed by applying the adaptive input and state estimation (AIE/ASE) algorithm. Numerical examples are provided to assess the efficacy of the proposed methodology.
Robust AI Driving Strategy for Autonomous Vehicles
Jul 16, 2022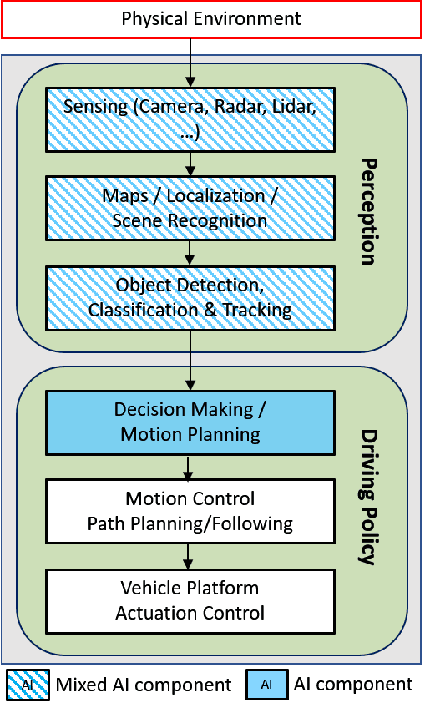

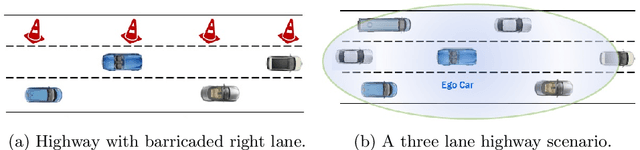
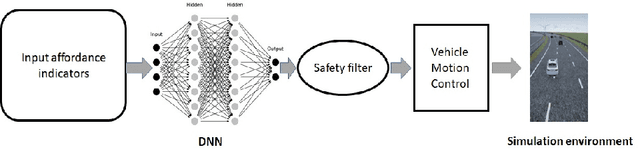
There has been significant progress in sensing, perception, and localization for automated driving, However, due to the wide spectrum of traffic/road structure scenarios and the long tail distribution of human driver behavior, it has remained an open challenge for an intelligent vehicle to always know how to make and execute the best decision on road given available sensing / perception / localization information. In this chapter, we talk about how artificial intelligence and more specifically, reinforcement learning, can take advantage of operational knowledge and safety reflex to make strategical and tactical decisions. We discuss some challenging problems related to the robustness of reinforcement learning solutions and their implications to the practical design of driving strategies for autonomous vehicles. We focus on automated driving on highway and the integration of reinforcement learning, vehicle motion control, and control barrier function, leading to a robust AI driving strategy that can learn and adapt safely.