 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNoise transfer for unsupervised domain adaptation of retinal OCT images
Sep 16, 2022Optical coherence tomography (OCT) imaging from different camera devices causes challenging domain shifts and can cause a severe drop in accuracy for machine learning models. In this work, we introduce a minimal noise adaptation method based on a singular value decomposition (SVDNA) to overcome the domain gap between target domains from three different device manufacturers in retinal OCT imaging. Our method utilizes the difference in noise structure to successfully bridge the domain gap between different OCT devices and transfer the style from unlabeled target domain images to source images for which manual annotations are available. We demonstrate how this method, despite its simplicity, compares or even outperforms state-of-the-art unsupervised domain adaptation methods for semantic segmentation on a public OCT dataset. SVDNA can be integrated with just a few lines of code into the augmentation pipeline of any network which is in contrast to many state-of-the-art domain adaptation methods which often need to change the underlying model architecture or train a separate style transfer model. The full code implementation for SVDNA is available at https://github.com/ValentinKoch/SVDNA.
Robust AI Driving Strategy for Autonomous Vehicles
Jul 16, 2022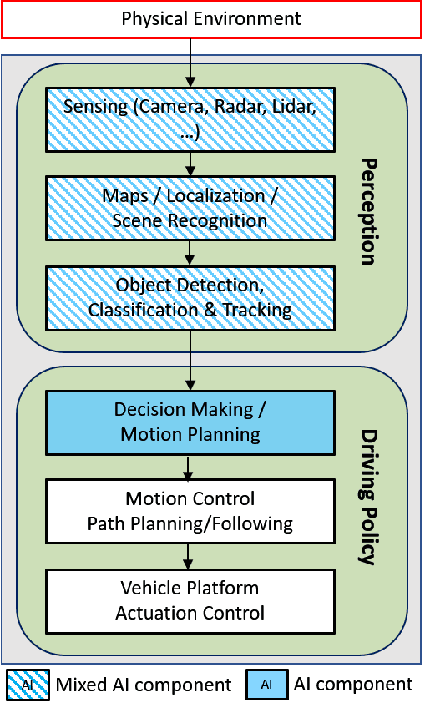

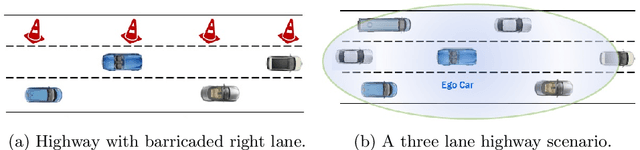
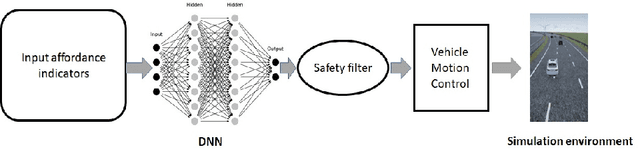
There has been significant progress in sensing, perception, and localization for automated driving, However, due to the wide spectrum of traffic/road structure scenarios and the long tail distribution of human driver behavior, it has remained an open challenge for an intelligent vehicle to always know how to make and execute the best decision on road given available sensing / perception / localization information. In this chapter, we talk about how artificial intelligence and more specifically, reinforcement learning, can take advantage of operational knowledge and safety reflex to make strategical and tactical decisions. We discuss some challenging problems related to the robustness of reinforcement learning solutions and their implications to the practical design of driving strategies for autonomous vehicles. We focus on automated driving on highway and the integration of reinforcement learning, vehicle motion control, and control barrier function, leading to a robust AI driving strategy that can learn and adapt safely.