 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhose Is This?: Context-Aware Object Ownership Inference with Uncertainty-Guided Questioning
May 27, 2026Service robots must infer object ownership to correctly interpret instructions such as "bring me my cup." However, ownership is a latent attribute that cannot be directly observed, and existing methods often rely on limited cues such as recent usage, making them unreliable in scenarios such as temporary sharing. We propose a framework for context-aware ownership inference with uncertainty-guided interaction (COIN). The method integrates user background information and object usage history using a large language model (LLM) to estimate ownership scores. To handle uncertainty, we apply conformal prediction to construct a set of plausible owners and selectively generate user queries when the prediction is uncertain. Experiments in a simulated home environment show that the proposed method consistently outperforms baseline approaches, achieving a Subset Accuracy of 0.988 and a Mean Jaccard index of 0.991. The method also maintains high performance in scenarios involving temporary use and shared ownership. The results demonstrate that combining contextual reasoning with uncertainty-aware interaction improves both estimation accuracy and robustness. The project page is available at https://emergentsystemlabstudent.github.io/COIN/.
Toward Ownership Understanding of Objects: Active Question Generation with Large Language Model and Probabilistic Generative Model
Sep 16, 2025Robots operating in domestic and office environments must understand object ownership to correctly execute instructions such as ``Bring me my cup.'' However, ownership cannot be reliably inferred from visual features alone. To address this gap, we propose Active Ownership Learning (ActOwL), a framework that enables robots to actively generate and ask ownership-related questions to users. ActOwL employs a probabilistic generative model to select questions that maximize information gain, thereby acquiring ownership knowledge efficiently to improve learning efficiency. Additionally, by leveraging commonsense knowledge from Large Language Models (LLM), objects are pre-classified as either shared or owned, and only owned objects are targeted for questioning. Through experiments in a simulated home environment and a real-world laboratory setting, ActOwL achieved significantly higher ownership clustering accuracy with fewer questions than baseline methods. These findings demonstrate the effectiveness of combining active inference with LLM-guided commonsense reasoning, advancing the capability of robots to acquire ownership knowledge for practical and socially appropriate task execution.
Multi-Robot Task Planning for Multi-Object Retrieval Tasks with Distributed On-Site Knowledge via Large Language Models
Sep 16, 2025



It is crucial to efficiently execute instructions such as "Find an apple and a banana" or "Get ready for a field trip," which require searching for multiple objects or understanding context-dependent commands. This study addresses the challenging problem of determining which robot should be assigned to which part of a task when each robot possesses different situational on-site knowledge-specifically, spatial concepts learned from the area designated to it by the user. We propose a task planning framework that leverages large language models (LLMs) and spatial concepts to decompose natural language instructions into subtasks and allocate them to multiple robots. We designed a novel few-shot prompting strategy that enables LLMs to infer required objects from ambiguous commands and decompose them into appropriate subtasks. In our experiments, the proposed method achieved 47/50 successful assignments, outperforming random (28/50) and commonsense-based assignment (26/50). Furthermore, we conducted qualitative evaluations using two actual mobile manipulators. The results demonstrated that our framework could handle instructions, including those involving ad hoc categories such as "Get ready for a field trip," by successfully performing task decomposition, assignment, sequential planning, and execution.
Co-Creative Learning via Metropolis-Hastings Interaction between Humans and AI
Jun 18, 2025



We propose co-creative learning as a novel paradigm where humans and AI, i.e., biological and artificial agents, mutually integrate their partial perceptual information and knowledge to construct shared external representations, a process we interpret as symbol emergence. Unlike traditional AI teaching based on unilateral knowledge transfer, this addresses the challenge of integrating information from inherently different modalities. We empirically test this framework using a human-AI interaction model based on the Metropolis-Hastings naming game (MHNG), a decentralized Bayesian inference mechanism. In an online experiment, 69 participants played a joint attention naming game (JA-NG) with one of three computer agent types (MH-based, always-accept, or always-reject) under partial observability. Results show that human-AI pairs with an MH-based agent significantly improved categorization accuracy through interaction and achieved stronger convergence toward a shared sign system. Furthermore, human acceptance behavior aligned closely with the MH-derived acceptance probability. These findings provide the first empirical evidence for co-creative learning emerging in human-AI dyads via MHNG-based interaction. This suggests a promising path toward symbiotic AI systems that learn with humans, rather than from them, by dynamically aligning perceptual experiences, opening a new venue for symbiotic AI alignment.
Real-world Instance-specific Image Goal Navigation for Service Robots: Bridging the Domain Gap with Contrastive Learning
Apr 15, 2024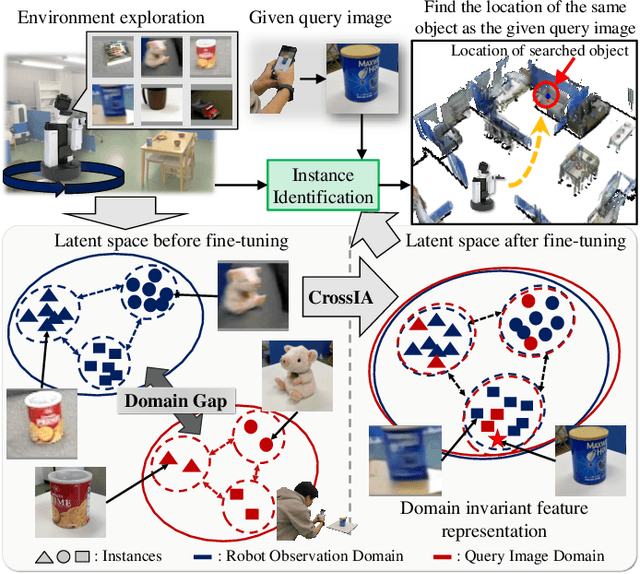
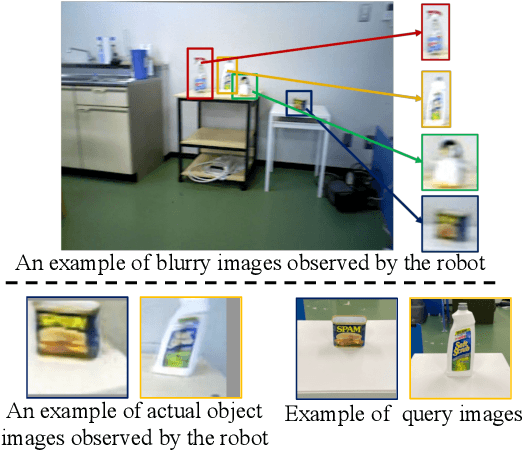
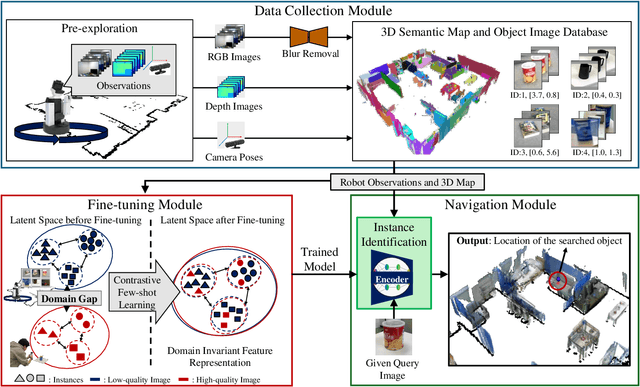
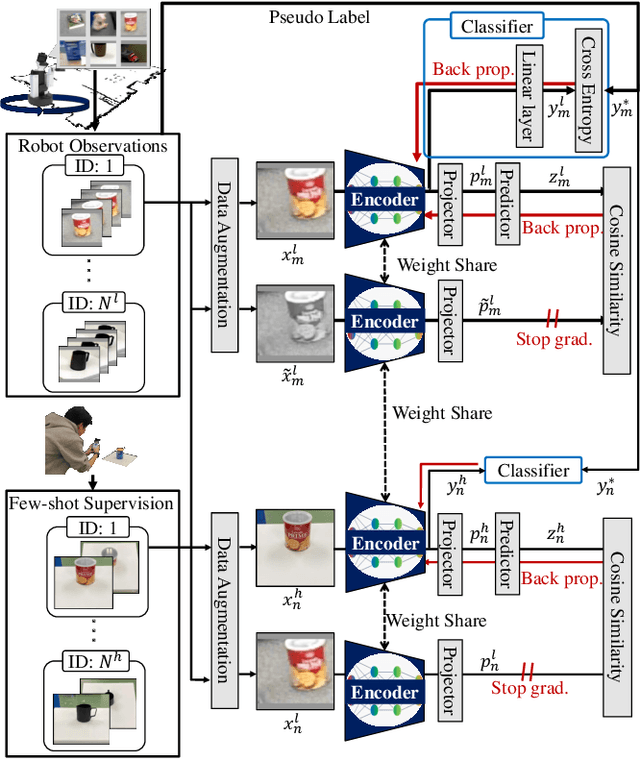
Improving instance-specific image goal navigation (InstanceImageNav), which locates the identical object in a real-world environment from a query image, is essential for robotic systems to assist users in finding desired objects. The challenge lies in the domain gap between low-quality images observed by the moving robot, characterized by motion blur and low-resolution, and high-quality query images provided by the user. Such domain gaps could significantly reduce the task success rate but have not been the focus of previous work. To address this, we propose a novel method called Few-shot Cross-quality Instance-aware Adaptation (CrossIA), which employs contrastive learning with an instance classifier to align features between massive low- and few high-quality images. This approach effectively reduces the domain gap by bringing the latent representations of cross-quality images closer on an instance basis. Additionally, the system integrates an object image collection with a pre-trained deblurring model to enhance the observed image quality. Our method fine-tunes the SimSiam model, pre-trained on ImageNet, using CrossIA. We evaluated our method's effectiveness through an InstanceImageNav task with 20 different types of instances, where the robot identifies the same instance in a real-world environment as a high-quality query image. Our experiments showed that our method improves the task success rate by up to three times compared to the baseline, a conventional approach based on SuperGlue. These findings highlight the potential of leveraging contrastive learning and image enhancement techniques to bridge the domain gap and improve object localization in robotic applications. The project website is https://emergentsystemlabstudent.github.io/DomainBridgingNav/.
Object Instance Retrieval in Assistive Robotics: Leveraging Fine-Tuned SimSiam with Multi-View Images Based on 3D Semantic Map
Apr 15, 2024



Robots that assist in daily life are required to locate specific instances of objects that match the user's desired object in the environment. This task is known as Instance-Specific Image Goal Navigation (InstanceImageNav), which requires a model capable of distinguishing between different instances within the same class. One significant challenge in robotics is that when a robot observes the same object from various 3D viewpoints, its appearance may differ greatly, making it difficult to recognize and locate the object accurately. In this study, we introduce a method, SimView, that leverages multi-view images based on a 3D semantic map of the environment and self-supervised learning by SimSiam to train an instance identification model on-site. The effectiveness of our approach is validated using a photorealistic simulator, Habitat Matterport 3D, created by scanning real home environments. Our results demonstrate a 1.7-fold improvement in task accuracy compared to CLIP, which is pre-trained multimodal contrastive learning for object search. This improvement highlights the benefits of our proposed fine-tuning method in enhancing the performance of assistive robots in InstanceImageNav tasks. The project website is https://emergentsystemlabstudent.github.io/MultiViewRetrieve/.
Symbol emergence as interpersonal cross-situational learning: the emergence of lexical knowledge with combinatoriality
Jun 27, 2023



We present a computational model for a symbol emergence system that enables the emergence of lexical knowledge with combinatoriality among agents through a Metropolis-Hastings naming game and cross-situational learning. Many computational models have been proposed to investigate combinatoriality in emergent communication and symbol emergence in cognitive and developmental robotics. However, existing models do not sufficiently address category formation based on sensory-motor information and semiotic communication through the exchange of word sequences within a single integrated model. Our proposed model facilitates the emergence of lexical knowledge with combinatoriality by performing category formation using multimodal sensory-motor information and enabling semiotic communication through the exchange of word sequences among agents in a unified model. Furthermore, the model enables an agent to predict sensory-motor information for unobserved situations by combining words associated with categories in each modality. We conducted two experiments with two humanoid robots in a simulated environment to evaluate our proposed model. The results demonstrated that the agents can acquire lexical knowledge with combinatoriality through interpersonal cross-situational learning based on the Metropolis-Hastings naming game and cross-situational learning. Furthermore, our results indicate that the lexical knowledge developed using our proposed model exhibits generalization performance for novel situations through interpersonal cross-modal inference.
Recursive Metropolis-Hastings Naming Game: Symbol Emergence in a Multi-agent System based on Probabilistic Generative Models
May 31, 2023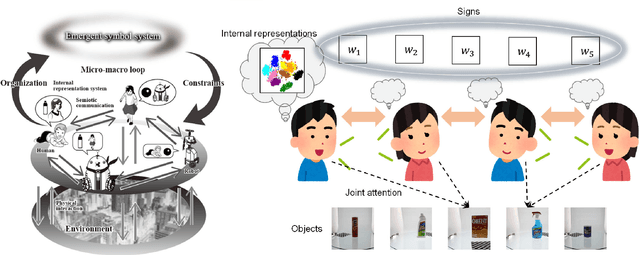

In the studies on symbol emergence and emergent communication in a population of agents, a computational model was employed in which agents participate in various language games. Among these, the Metropolis-Hastings naming game (MHNG) possesses a notable mathematical property: symbol emergence through MHNG is proven to be a decentralized Bayesian inference of representations shared by the agents. However, the previously proposed MHNG is limited to a two-agent scenario. This paper extends MHNG to an N-agent scenario. The main contributions of this paper are twofold: (1) we propose the recursive Metropolis-Hastings naming game (RMHNG) as an N-agent version of MHNG and demonstrate that RMHNG is an approximate Bayesian inference method for the posterior distribution over a latent variable shared by agents, similar to MHNG; and (2) we empirically evaluate the performance of RMHNG on synthetic and real image data, enabling multiple agents to develop and share a symbol system. Furthermore, we introduce two types of approximations -- one-sample and limited-length -- to reduce computational complexity while maintaining the ability to explain communication in a population of agents. The experimental findings showcased the efficacy of RMHNG as a decentralized Bayesian inference for approximating the posterior distribution concerning latent variables, which are jointly shared among agents, akin to MHNG. Moreover, the utilization of RMHNG elucidated the agents' capacity to exchange symbols. Furthermore, the study discovered that even the computationally simplified version of RMHNG could enable symbols to emerge among the agents.
Active Exploration based on Information Gain by Particle Filter for Efficient Spatial Concept Formation
Nov 20, 2022Autonomous robots are required to actively and adaptively learn the categories and words of various places by exploring the surrounding environment and interacting with users. In semantic mapping and spatial language acquisition conducted using robots, it is costly and labor-intensive to prepare training datasets that contain linguistic instructions from users. Therefore, we aimed to enable mobile robots to learn spatial concepts through autonomous active exploration. This study is characterized by interpreting the `action' of the robot that asks the user the question `What kind of place is this?' in the context of active inference. We propose an active inference method, spatial concept formation with information gain-based active exploration (SpCoAE), that combines sequential Bayesian inference by particle filters and position determination based on information gain in a probabilistic generative model. Our experiment shows that the proposed method can efficiently determine a position to form appropriate spatial concepts in home environments. In particular, it is important to conduct efficient exploration that leads to appropriate concept formation and quickly covers the environment without adopting a haphazard exploration strategy.
Symbol Emergence as Inter-personal Categorization with Head-to-head Latent Word
May 24, 2022
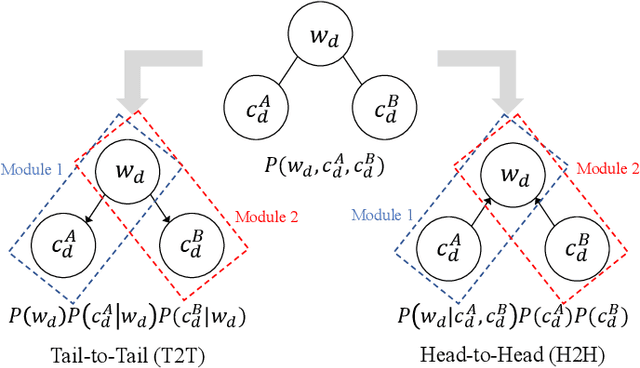
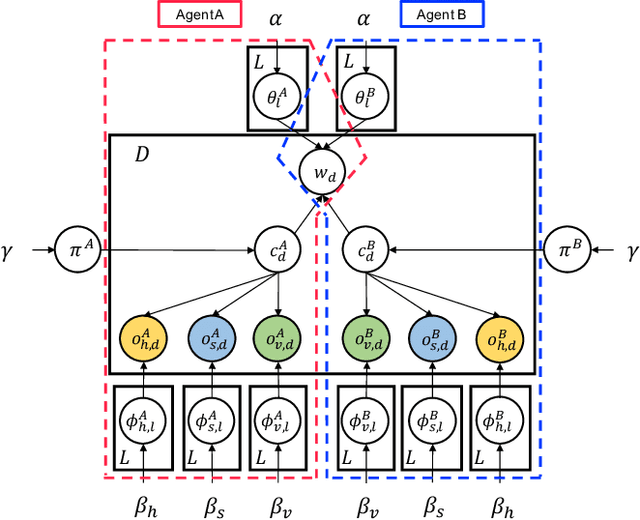

In this study, we propose a head-to-head type (H2H-type) inter-personal multimodal Dirichlet mixture (Inter-MDM) by modifying the original Inter-MDM, which is a probabilistic generative model that represents the symbol emergence between two agents as multiagent multimodal categorization. A Metropolis--Hastings method-based naming game based on the Inter-MDM enables two agents to collaboratively perform multimodal categorization and share signs with a solid mathematical foundation of convergence. However, the conventional Inter-MDM presumes a tail-to-tail connection across a latent word variable, causing inflexibility of the further extension of Inter-MDM for modeling a more complex symbol emergence. Therefore, we propose herein a head-to-head type (H2H-type) Inter-MDM that treats a latent word variable as a child node of an internal variable of each agent in the same way as many prior studies of multimodal categorization. On the basis of the H2H-type Inter-MDM, we propose a naming game in the same way as the conventional Inter-MDM. The experimental results show that the H2H-type Inter-MDM yields almost the same performance as the conventional Inter-MDM from the viewpoint of multimodal categorization and sign sharing.