 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Fairness of Task Arithmetic: The Role of Task Vectors
May 30, 2025Model editing techniques, particularly task arithmetic using task vectors, have shown promise in efficiently modifying pre-trained models through arithmetic operations like task addition and negation. Despite computational advantages, these methods may inadvertently affect model fairness, creating risks in sensitive applications like hate speech detection. However, the fairness implications of task arithmetic remain largely unexplored, presenting a critical gap in the existing literature. We systematically examine how manipulating task vectors affects fairness metrics, including Demographic Parity and Equalized Odds. To rigorously assess these effects, we benchmark task arithmetic against full fine-tuning, a costly but widely used baseline, and Low-Rank Adaptation (LoRA), a prevalent parameter-efficient fine-tuning method. Additionally, we explore merging task vectors from models fine-tuned on demographic subgroups vulnerable to hate speech, investigating whether fairness outcomes can be controlled by adjusting task vector coefficients, potentially enabling tailored model behavior. Our results offer novel insights into the fairness implications of model editing and establish a foundation for fairness-aware and responsible model editing practices.
Augmenting NER Datasets with LLMs: Towards Automated and Refined Annotation
Mar 30, 2024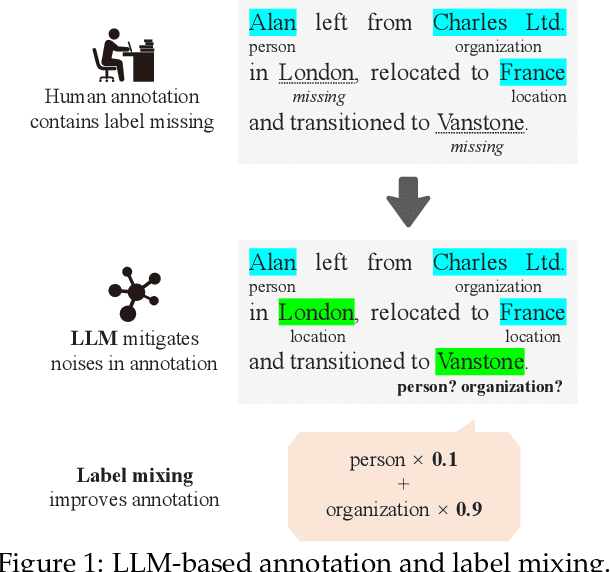
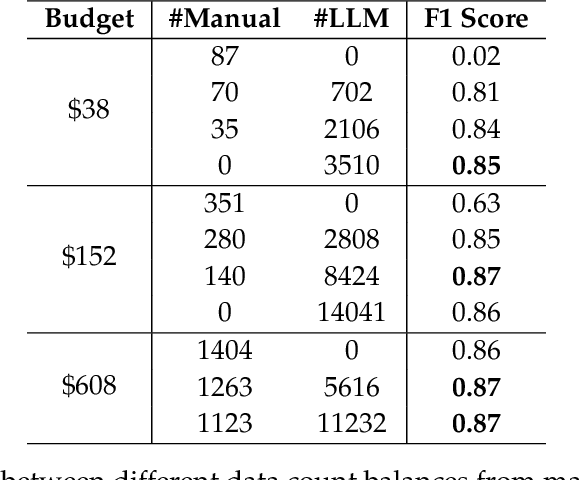
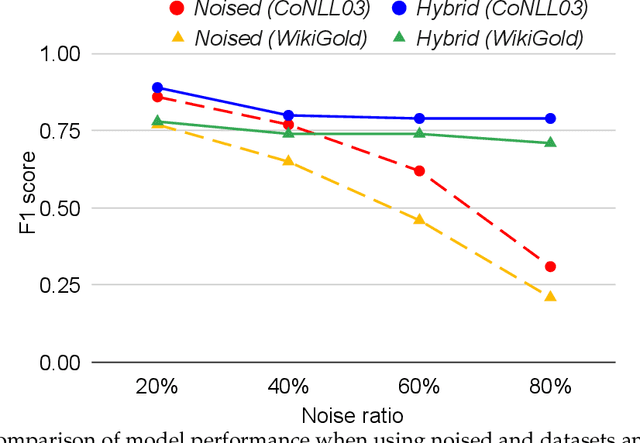
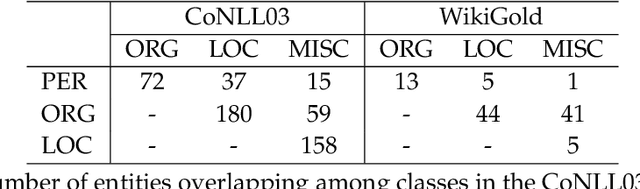
In the field of Natural Language Processing (NLP), Named Entity Recognition (NER) is recognized as a critical technology, employed across a wide array of applications. Traditional methodologies for annotating datasets for NER models are challenged by high costs and variations in dataset quality. This research introduces a novel hybrid annotation approach that synergizes human effort with the capabilities of Large Language Models (LLMs). This approach not only aims to ameliorate the noise inherent in manual annotations, such as omissions, thereby enhancing the performance of NER models, but also achieves this in a cost-effective manner. Additionally, by employing a label mixing strategy, it addresses the issue of class imbalance encountered in LLM-based annotations. Through an analysis across multiple datasets, this method has been consistently shown to provide superior performance compared to traditional annotation methods, even under constrained budget conditions. This study illuminates the potential of leveraging LLMs to improve dataset quality, introduces a novel technique to mitigate class imbalances, and demonstrates the feasibility of achieving high-performance NER in a cost-effective way.
Symbol emergence as interpersonal cross-situational learning: the emergence of lexical knowledge with combinatoriality
Jun 27, 2023



We present a computational model for a symbol emergence system that enables the emergence of lexical knowledge with combinatoriality among agents through a Metropolis-Hastings naming game and cross-situational learning. Many computational models have been proposed to investigate combinatoriality in emergent communication and symbol emergence in cognitive and developmental robotics. However, existing models do not sufficiently address category formation based on sensory-motor information and semiotic communication through the exchange of word sequences within a single integrated model. Our proposed model facilitates the emergence of lexical knowledge with combinatoriality by performing category formation using multimodal sensory-motor information and enabling semiotic communication through the exchange of word sequences among agents in a unified model. Furthermore, the model enables an agent to predict sensory-motor information for unobserved situations by combining words associated with categories in each modality. We conducted two experiments with two humanoid robots in a simulated environment to evaluate our proposed model. The results demonstrated that the agents can acquire lexical knowledge with combinatoriality through interpersonal cross-situational learning based on the Metropolis-Hastings naming game and cross-situational learning. Furthermore, our results indicate that the lexical knowledge developed using our proposed model exhibits generalization performance for novel situations through interpersonal cross-modal inference.