 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Ownership Understanding of Objects: Active Question Generation with Large Language Model and Probabilistic Generative Model
Sep 16, 2025Robots operating in domestic and office environments must understand object ownership to correctly execute instructions such as ``Bring me my cup.'' However, ownership cannot be reliably inferred from visual features alone. To address this gap, we propose Active Ownership Learning (ActOwL), a framework that enables robots to actively generate and ask ownership-related questions to users. ActOwL employs a probabilistic generative model to select questions that maximize information gain, thereby acquiring ownership knowledge efficiently to improve learning efficiency. Additionally, by leveraging commonsense knowledge from Large Language Models (LLM), objects are pre-classified as either shared or owned, and only owned objects are targeted for questioning. Through experiments in a simulated home environment and a real-world laboratory setting, ActOwL achieved significantly higher ownership clustering accuracy with fewer questions than baseline methods. These findings demonstrate the effectiveness of combining active inference with LLM-guided commonsense reasoning, advancing the capability of robots to acquire ownership knowledge for practical and socially appropriate task execution.
Multi-Robot Task Planning for Multi-Object Retrieval Tasks with Distributed On-Site Knowledge via Large Language Models
Sep 16, 2025



It is crucial to efficiently execute instructions such as "Find an apple and a banana" or "Get ready for a field trip," which require searching for multiple objects or understanding context-dependent commands. This study addresses the challenging problem of determining which robot should be assigned to which part of a task when each robot possesses different situational on-site knowledge-specifically, spatial concepts learned from the area designated to it by the user. We propose a task planning framework that leverages large language models (LLMs) and spatial concepts to decompose natural language instructions into subtasks and allocate them to multiple robots. We designed a novel few-shot prompting strategy that enables LLMs to infer required objects from ambiguous commands and decompose them into appropriate subtasks. In our experiments, the proposed method achieved 47/50 successful assignments, outperforming random (28/50) and commonsense-based assignment (26/50). Furthermore, we conducted qualitative evaluations using two actual mobile manipulators. The results demonstrated that our framework could handle instructions, including those involving ad hoc categories such as "Get ready for a field trip," by successfully performing task decomposition, assignment, sequential planning, and execution.
Real-world Instance-specific Image Goal Navigation for Service Robots: Bridging the Domain Gap with Contrastive Learning
Apr 15, 2024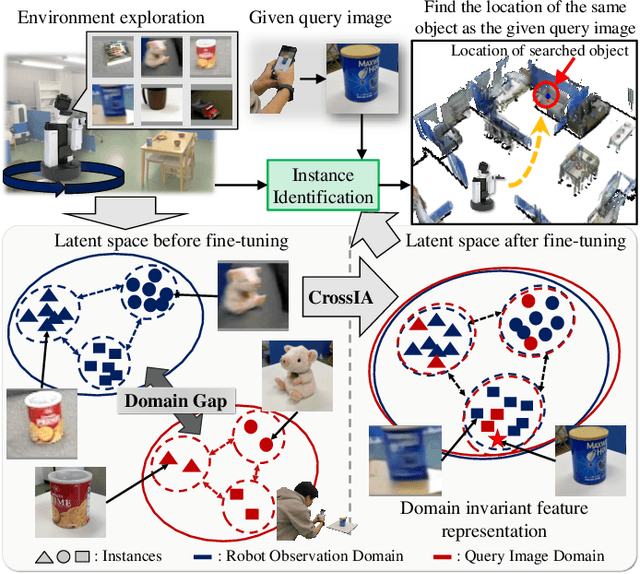
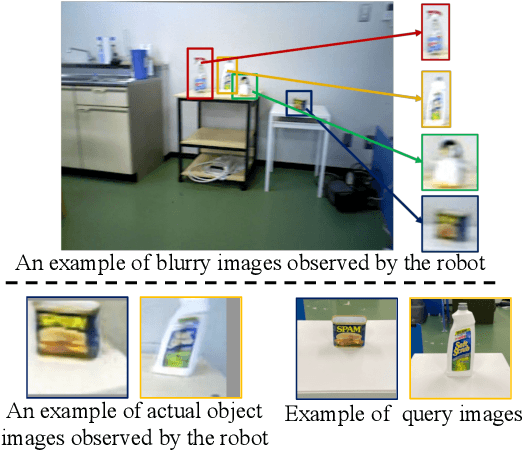
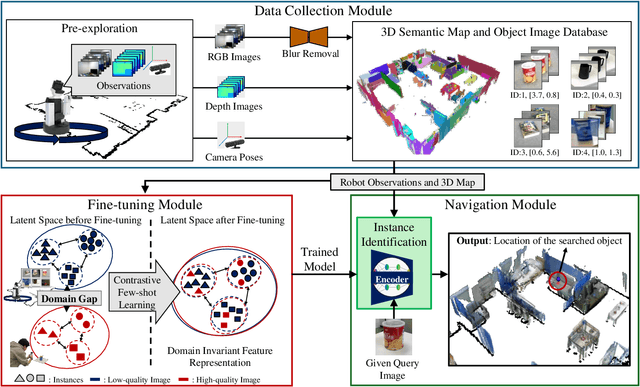
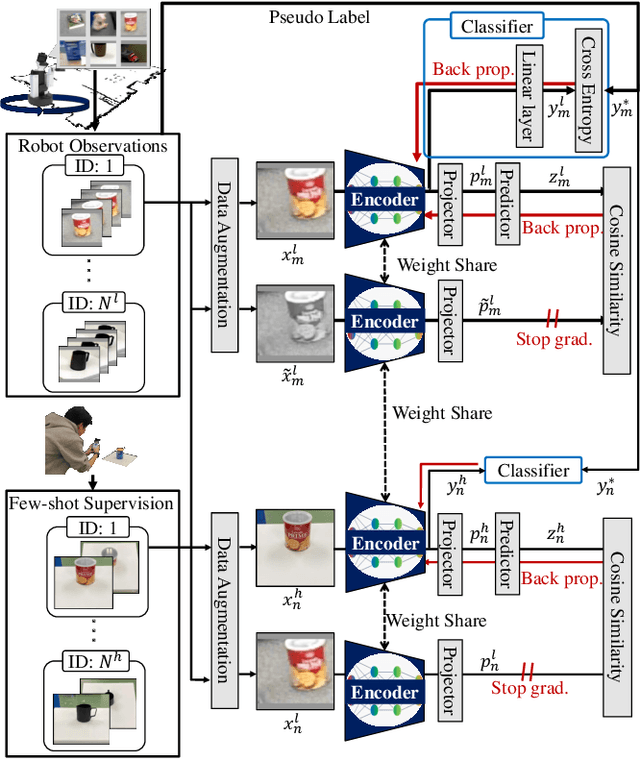
Improving instance-specific image goal navigation (InstanceImageNav), which locates the identical object in a real-world environment from a query image, is essential for robotic systems to assist users in finding desired objects. The challenge lies in the domain gap between low-quality images observed by the moving robot, characterized by motion blur and low-resolution, and high-quality query images provided by the user. Such domain gaps could significantly reduce the task success rate but have not been the focus of previous work. To address this, we propose a novel method called Few-shot Cross-quality Instance-aware Adaptation (CrossIA), which employs contrastive learning with an instance classifier to align features between massive low- and few high-quality images. This approach effectively reduces the domain gap by bringing the latent representations of cross-quality images closer on an instance basis. Additionally, the system integrates an object image collection with a pre-trained deblurring model to enhance the observed image quality. Our method fine-tunes the SimSiam model, pre-trained on ImageNet, using CrossIA. We evaluated our method's effectiveness through an InstanceImageNav task with 20 different types of instances, where the robot identifies the same instance in a real-world environment as a high-quality query image. Our experiments showed that our method improves the task success rate by up to three times compared to the baseline, a conventional approach based on SuperGlue. These findings highlight the potential of leveraging contrastive learning and image enhancement techniques to bridge the domain gap and improve object localization in robotic applications. The project website is https://emergentsystemlabstudent.github.io/DomainBridgingNav/.
Object Instance Retrieval in Assistive Robotics: Leveraging Fine-Tuned SimSiam with Multi-View Images Based on 3D Semantic Map
Apr 15, 2024



Robots that assist in daily life are required to locate specific instances of objects that match the user's desired object in the environment. This task is known as Instance-Specific Image Goal Navigation (InstanceImageNav), which requires a model capable of distinguishing between different instances within the same class. One significant challenge in robotics is that when a robot observes the same object from various 3D viewpoints, its appearance may differ greatly, making it difficult to recognize and locate the object accurately. In this study, we introduce a method, SimView, that leverages multi-view images based on a 3D semantic map of the environment and self-supervised learning by SimSiam to train an instance identification model on-site. The effectiveness of our approach is validated using a photorealistic simulator, Habitat Matterport 3D, created by scanning real home environments. Our results demonstrate a 1.7-fold improvement in task accuracy compared to CLIP, which is pre-trained multimodal contrastive learning for object search. This improvement highlights the benefits of our proposed fine-tuning method in enhancing the performance of assistive robots in InstanceImageNav tasks. The project website is https://emergentsystemlabstudent.github.io/MultiViewRetrieve/.