 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQBIT: Quality-Aware Cloud-Based Benchmarking for Robotic Insertion Tasks
Mar 10, 2025



Insertion tasks are fundamental yet challenging for robots, particularly in autonomous operations, due to their continuous interaction with the environment. AI-based approaches appear to be up to the challenge, but in production they must not only achieve high success rates. They must also ensure insertion quality and reliability. To address this, we introduce QBIT, a quality-aware benchmarking framework that incorporates additional metrics such as force energy, force smoothness and completion time to provide a comprehensive assessment. To ensure statistical significance and minimize the sim-to-real gap, we randomize contact parameters in the MuJoCo simulator, account for perceptual uncertainty, and conduct large-scale experiments on a Kubernetes-based infrastructure. Our microservice-oriented architecture ensures extensibility, broad applicability, and improved reproducibility. To facilitate seamless transitions to physical robotic testing, we use ROS2 with containerization to reduce integration barriers. We evaluate QBIT using three insertion approaches: geometricbased, force-based, and learning-based, in both simulated and real-world environments. In simulation, we compare the accuracy of contact simulation using different mesh decomposition techniques. Our results demonstrate the effectiveness of QBIT in comparing different insertion approaches and accelerating the transition from laboratory to real-world applications. Code is available on GitHub.
ETA-IK: Execution-Time-Aware Inverse Kinematics for Dual-Arm Systems
Nov 21, 2024This paper presents ETA-IK, a novel Execution-Time-Aware Inverse Kinematics method tailored for dual-arm robotic systems. The primary goal is to optimize motion execution time by leveraging the redundancy of both arms, specifically in tasks where only the relative pose of the robots is constrained, such as dual-arm scanning of unknown objects. Unlike traditional inverse kinematics methods that use surrogate metrics such as joint configuration distance, our method incorporates direct motion execution time and implicit collisions into the optimization process, thereby finding target joints that allow subsequent trajectory generation to get more efficient and collision-free motion. A neural network based execution time approximator is employed to predict time-efficient joint configurations while accounting for potential collisions. Through experimental evaluation on a system composed of a UR5 and a KUKA iiwa robot, we demonstrate significant reductions in execution time. The proposed method outperforms conventional approaches, showing improved motion efficiency without sacrificing positioning accuracy. These results highlight the potential of ETA-IK to improve the performance of dual-arm systems in applications, where efficiency and safety are paramount.
Scenario Execution for Robotics: A generic, backend-agnostic library for running reproducible robotics experiments and tests
Sep 11, 2024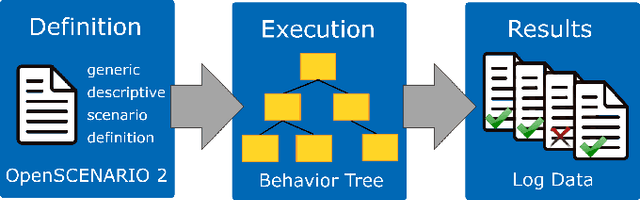
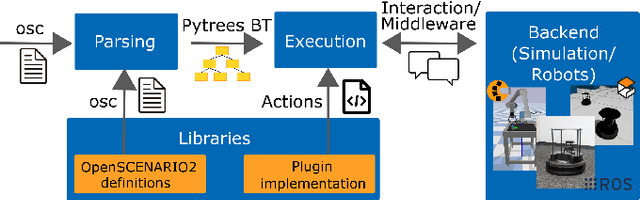
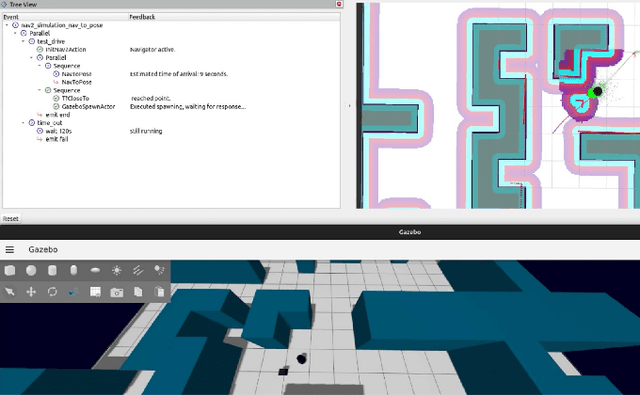
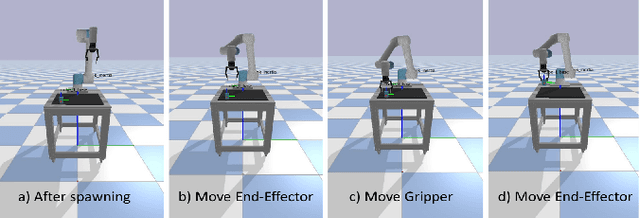
Testing and evaluation of robotics systems is a difficult and oftentimes tedious task due to the systems' complexity and a lack of tools to conduct reproducible robotics experiments. Additionally, almost all available tools are either tailored towards a specific application domain, simulator or middleware. Particularly scenario-based testing, a common practice in the domain of automated driving, is not sufficiently covered in the robotics domain. In this paper, we propose a novel backend- and middleware-agnostic approach for conducting systematic, reproducible and automatable robotics experiments called Scenario Execution for Robotics. Our approach is implemented as a Python library built on top of the generic scenario description language OpenSCENARIO 2 and Behavior Trees and is made publicly available on GitHub. In extensive experiments, we demonstrate that our approach supports multiple simulators as backend and can be used as a standalone Python-library or as part of the ROS2 ecosystem. Furthermore, we demonstrate how our approach enables testing over ranges of varying values. Finally, we show how Scenario Execution for Robotics allows to move from simulation-based to real-world experiments with minimal adaptations to the scenario description file.