 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReplicable Simulation-Based Robot Validation through Provenance
May 28, 2026Robot behavior is often validated through simulation-based testing, yet the replicability of such campaigns depends critically on transparent documentation of how tests are configured, executed, and post-processed. We argue that data provenance, coupled with the FAIR principles (findability, accessibility, interoperability, and reusability), addresses this gap by explicitly tracking links between artifacts and by attaching machine-readable metadata about file origins and key design decisions. Moreover, provenance and metadata cannot be treated as an afterthought confined to final datasets; they must be integrated into the testing processes that generate those datasets so that evidence can be reconstructed end-to-end. We demonstrate this by augmenting an existing simulation-based testing framework with provenance tracking and metadata collection mechanisms, and by using these extensions to enrich a mobile robot navigation dataset with structured provenance and FAIR-aligned metadata. Finally, we discuss obstacles encountered in this integration -- such as vocabulary alignment, attribute selection, and adoption of domain standards -- and provide actionable recommendations for implementing provenance-centric, FAIR metadata in robotics validation workflows.
A generic approach for reactive stateful mitigation of application failures in distributed robotics systems deployed with Kubernetes
Oct 24, 2024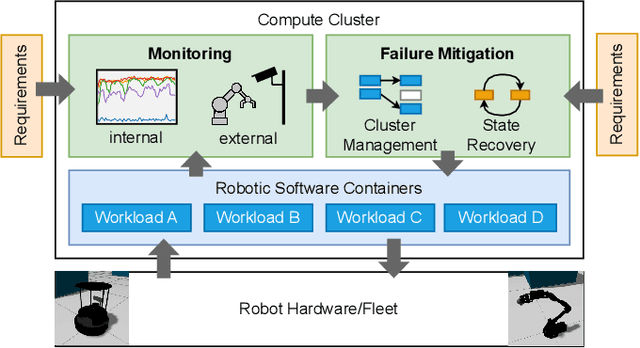
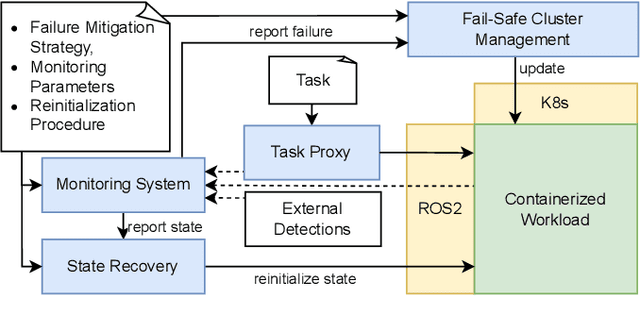
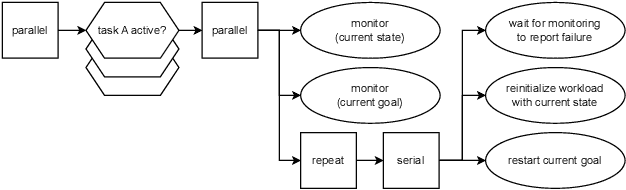
Offloading computationally expensive algorithms to the edge or even cloud offers an attractive option to tackle limitations regarding on-board computational and energy resources of robotic systems. In cloud-native applications deployed with the container management system Kubernetes (K8s), one key problem is ensuring resilience against various types of failures. However, complex robotic systems interacting with the physical world pose a very specific set of challenges and requirements that are not yet covered by failure mitigation approaches from the cloud-native domain. In this paper, we therefore propose a novel approach for robotic system monitoring and stateful, reactive failure mitigation for distributed robotic systems deployed using Kubernetes (K8s) and the Robot Operating System (ROS2). By employing the generic substrate of Behaviour Trees, our approach can be applied to any robotic workload and supports arbitrarily complex monitoring and failure mitigation strategies. We demonstrate the effectiveness and application-agnosticism of our approach on two example applications, namely Autonomous Mobile Robot (AMR) navigation and robotic manipulation in a simulated environment.
Scenario Execution for Robotics: A generic, backend-agnostic library for running reproducible robotics experiments and tests
Sep 11, 2024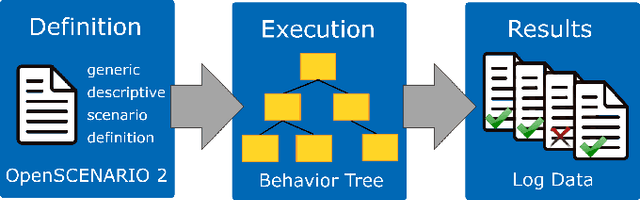
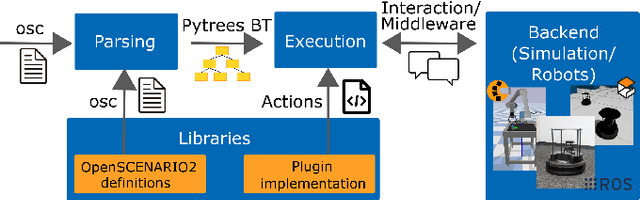
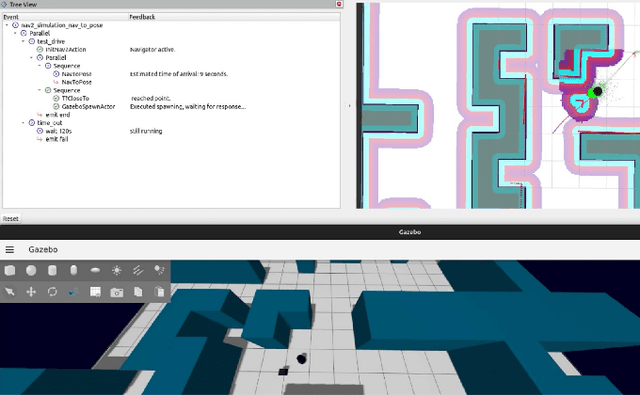
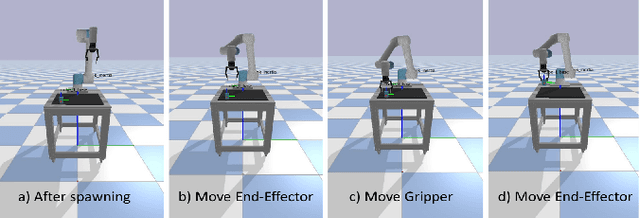
Testing and evaluation of robotics systems is a difficult and oftentimes tedious task due to the systems' complexity and a lack of tools to conduct reproducible robotics experiments. Additionally, almost all available tools are either tailored towards a specific application domain, simulator or middleware. Particularly scenario-based testing, a common practice in the domain of automated driving, is not sufficiently covered in the robotics domain. In this paper, we propose a novel backend- and middleware-agnostic approach for conducting systematic, reproducible and automatable robotics experiments called Scenario Execution for Robotics. Our approach is implemented as a Python library built on top of the generic scenario description language OpenSCENARIO 2 and Behavior Trees and is made publicly available on GitHub. In extensive experiments, we demonstrate that our approach supports multiple simulators as backend and can be used as a standalone Python-library or as part of the ROS2 ecosystem. Furthermore, we demonstrate how our approach enables testing over ranges of varying values. Finally, we show how Scenario Execution for Robotics allows to move from simulation-based to real-world experiments with minimal adaptations to the scenario description file.