 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Risk Assessment for Human-Robot Collaboration Using a Heuristics-based Approach
Mar 11, 2025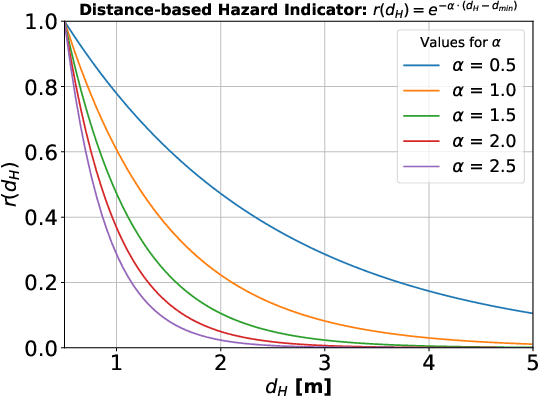



Human-robot collaboration (HRC) introduces significant safety challenges, particularly in protecting human operators working alongside collaborative robots (cobots). While current ISO standards emphasize risk assessment and hazard identification, these procedures are often insufficient for addressing the complexity of HRC environments, which involve numerous design factors and dynamic interactions. This publication presents a method for objective hazard analysis to support Dynamic Risk Assessment, extending beyond reliance on expert knowledge. The approach monitors scene parameters, such as the distance between human body parts and the cobot, as well as the cobot`s Cartesian velocity. Additionally, an anthropocentric parameter focusing on the orientation of the human head within the collaborative workspace is introduced. These parameters are transformed into hazard indicators using non-linear heuristic functions. The hazard indicators are then aggregated to estimate the total hazard level of a given scenario. The proposed method is evaluated using an industrial dataset that depicts various interactions between a human operator and a cobot.
ETA-IK: Execution-Time-Aware Inverse Kinematics for Dual-Arm Systems
Nov 21, 2024This paper presents ETA-IK, a novel Execution-Time-Aware Inverse Kinematics method tailored for dual-arm robotic systems. The primary goal is to optimize motion execution time by leveraging the redundancy of both arms, specifically in tasks where only the relative pose of the robots is constrained, such as dual-arm scanning of unknown objects. Unlike traditional inverse kinematics methods that use surrogate metrics such as joint configuration distance, our method incorporates direct motion execution time and implicit collisions into the optimization process, thereby finding target joints that allow subsequent trajectory generation to get more efficient and collision-free motion. A neural network based execution time approximator is employed to predict time-efficient joint configurations while accounting for potential collisions. Through experimental evaluation on a system composed of a UR5 and a KUKA iiwa robot, we demonstrate significant reductions in execution time. The proposed method outperforms conventional approaches, showing improved motion efficiency without sacrificing positioning accuracy. These results highlight the potential of ETA-IK to improve the performance of dual-arm systems in applications, where efficiency and safety are paramount.