 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Risk Assessment for Human-Robot Collaboration Using a Heuristics-based Approach
Paper and Code
Mar 11, 2025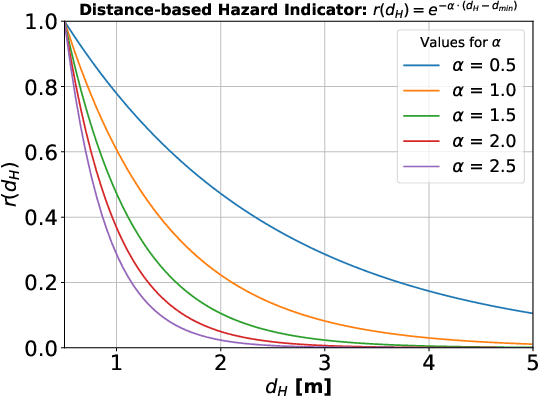



Human-robot collaboration (HRC) introduces significant safety challenges, particularly in protecting human operators working alongside collaborative robots (cobots). While current ISO standards emphasize risk assessment and hazard identification, these procedures are often insufficient for addressing the complexity of HRC environments, which involve numerous design factors and dynamic interactions. This publication presents a method for objective hazard analysis to support Dynamic Risk Assessment, extending beyond reliance on expert knowledge. The approach monitors scene parameters, such as the distance between human body parts and the cobot, as well as the cobot`s Cartesian velocity. Additionally, an anthropocentric parameter focusing on the orientation of the human head within the collaborative workspace is introduced. These parameters are transformed into hazard indicators using non-linear heuristic functions. The hazard indicators are then aggregated to estimate the total hazard level of a given scenario. The proposed method is evaluated using an industrial dataset that depicts various interactions between a human operator and a cobot.