 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Risk Assessment for Human-Robot Collaboration Using a Heuristics-based Approach
Mar 11, 2025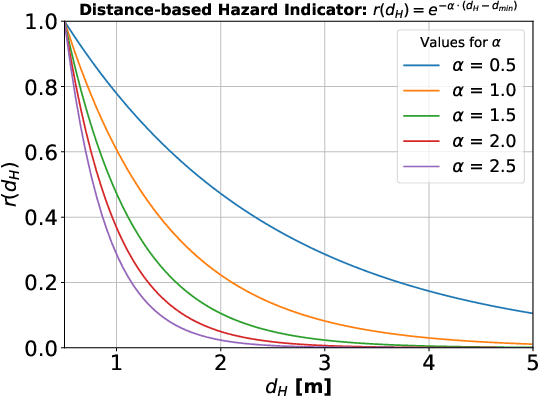



Human-robot collaboration (HRC) introduces significant safety challenges, particularly in protecting human operators working alongside collaborative robots (cobots). While current ISO standards emphasize risk assessment and hazard identification, these procedures are often insufficient for addressing the complexity of HRC environments, which involve numerous design factors and dynamic interactions. This publication presents a method for objective hazard analysis to support Dynamic Risk Assessment, extending beyond reliance on expert knowledge. The approach monitors scene parameters, such as the distance between human body parts and the cobot, as well as the cobot`s Cartesian velocity. Additionally, an anthropocentric parameter focusing on the orientation of the human head within the collaborative workspace is introduced. These parameters are transformed into hazard indicators using non-linear heuristic functions. The hazard indicators are then aggregated to estimate the total hazard level of a given scenario. The proposed method is evaluated using an industrial dataset that depicts various interactions between a human operator and a cobot.
Human Emergency Detection during Autonomous Hospital Transports
Jul 17, 2023Human transports in hospitals are labor-intensive and primarily performed in beds to save time. This transfer method does not promote the mobility or autonomy of the patient. To relieve the caregivers from this time-consuming task, a mobile robot is developed to autonomously transport humans around the hospital. It provides different transfer modes including walking and sitting in a wheelchair. The problem that this paper focuses on is to detect emergencies and ensure the well-being of the patient during the transport. For this purpose, the patient is tracked and monitored with a camera system. OpenPose is used for Human Pose Estimation and a trained classifier for emergency detection. We collected and published a dataset of 18,000 images in lab and hospital environments. It differs from related work because we have a moving robot with different transfer modes in a highly dynamic environment with multiple people in the scene using only RGB-D data. To improve the critical recall metric, we apply threshold moving and a time delay. We compare different models with an AutoML approach. This paper shows that emergencies while walking are best detected by a SVM with a recall of 95.8% on single frames. In the case of sitting transport, the best model achieves a recall of 62.2%. The contribution is to establish a baseline on this new dataset and to provide a proof of concept for the human emergency detection in this use case.