 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelay Hindsight Experience Replay: Continual Reinforcement Learning for Robot Manipulation Tasks with Sparse Rewards
Aug 01, 2022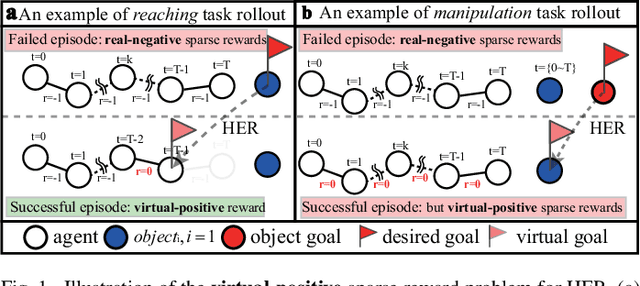
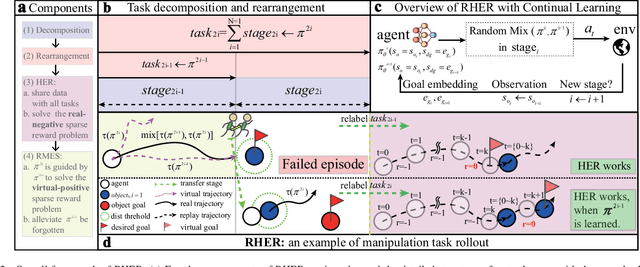
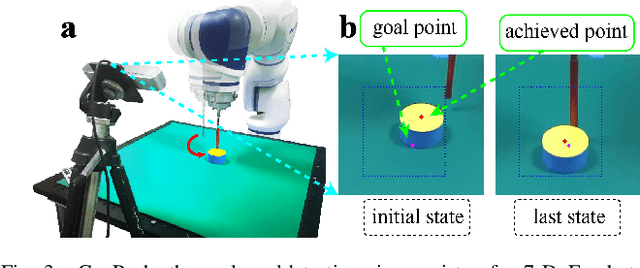
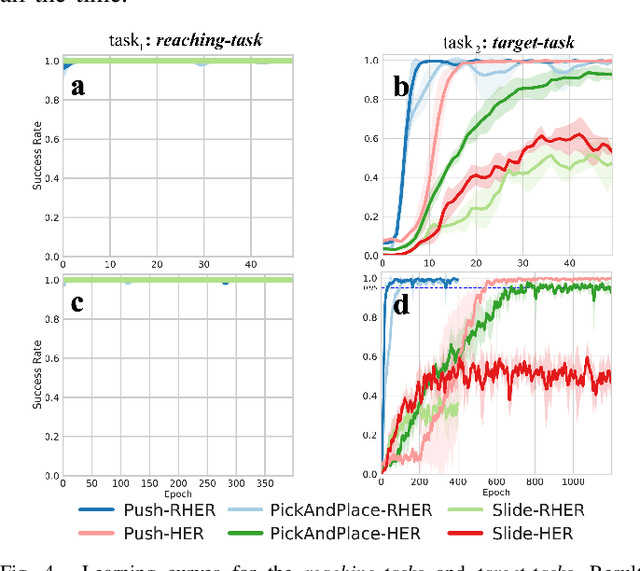
Learning with sparse rewards is usually inefficient in Reinforcement Learning (RL). Hindsight Experience Replay (HER) has been shown an effective solution to handle the low sample efficiency that results from sparse rewards by goal relabeling. However, the HER still has an implicit virtual-positive sparse reward problem caused by invariant achieved goals, especially for robot manipulation tasks. To solve this problem, we propose a novel model-free continual RL algorithm, called Relay-HER (RHER). The proposed method first decomposes and rearranges the original long-horizon task into new sub-tasks with incremental complexity. Subsequently, a multi-task network is designed to learn the sub-tasks in ascending order of complexity. To solve the virtual-positive sparse reward problem, we propose a Random-Mixed Exploration Strategy (RMES), in which the achieved goals of the sub-task with higher complexity are quickly changed under the guidance of the one with lower complexity. The experimental results indicate the significant improvements in sample efficiency of RHER compared to vanilla-HER in five typical robot manipulation tasks, including Push, PickAndPlace, Drawer, Insert, and ObstaclePush. The proposed RHER method has also been applied to learn a contact-rich push task on a physical robot from scratch, and the success rate reached 10/10 with only 250 episodes.
Balance Between Efficient and Effective Learning: Dense2Sparse Reward Shaping for Robot Manipulation with Environment Uncertainty
Mar 05, 2020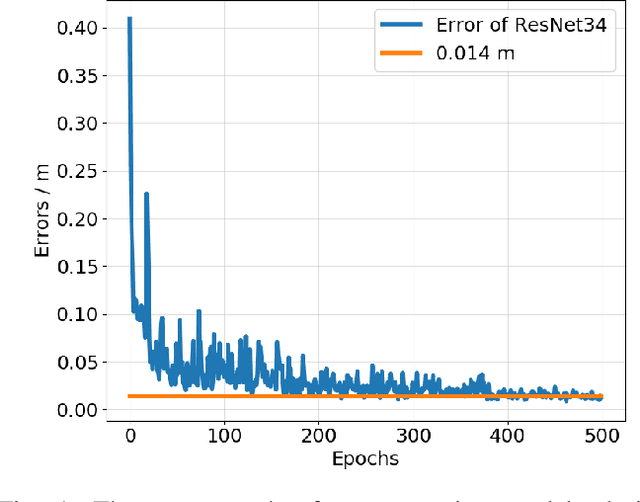
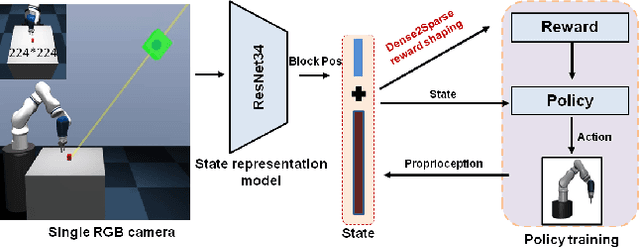
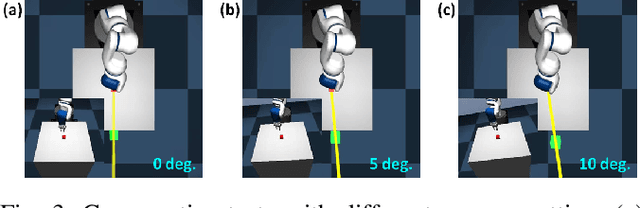
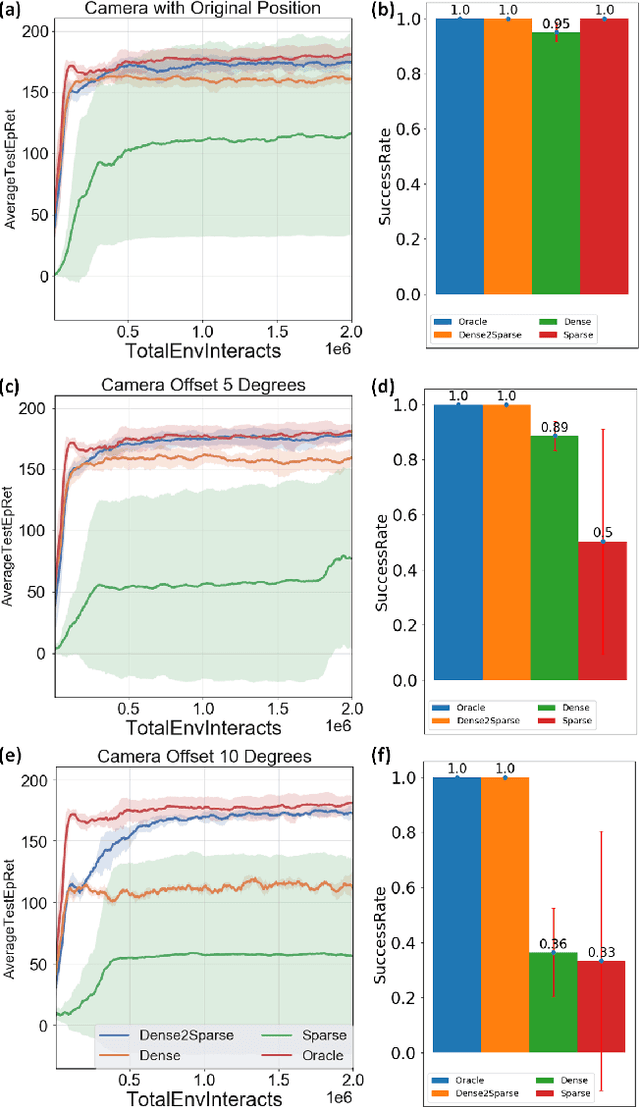
Efficient and effective learning is one of the ultimate goals of the deep reinforcement learning (DRL), although the compromise has been made in most of the time, especially for the application of robot manipulations. Learning is always expensive for robot manipulation tasks and the learning effectiveness could be affected by the system uncertainty. In order to solve above challenges, in this study, we proposed a simple but powerful reward shaping method, namely Dense2Sparse. It combines the advantage of fast convergence of dense reward and the noise isolation of the sparse reward, to achieve a balance between learning efficiency and effectiveness, which makes it suitable for robot manipulation tasks. We evaluated our Dense2Sparse method with a series of ablation experiments using the state representation model with system uncertainty. The experiment results show that the Dense2Sparse method obtained higher expected reward compared with the ones using standalone dense reward or sparse reward, and it also has a superior tolerance of system uncertainty.