 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlug, Play, and Fortify: A Low-Cost Module for Robust Multimodal Image Understanding Models
Feb 26, 2026Missing modalities present a fundamental challenge in multimodal models, often causing catastrophic performance degradation. Our observations suggest that this fragility stems from an imbalanced learning process, where the model develops an implicit preference for certain modalities, leading to the under-optimization of others. We propose a simple yet efficient method to address this challenge. The central insight of our work is that the dominance relationship between modalities can be effectively discerned and quantified in the frequency domain. To leverage this principle, we first introduce a Frequency Ratio Metric (FRM) to quantify modality preference by analyzing features in the frequency domain. Guided by FRM, we then propose a Multimodal Weight Allocation Module, a plug-and-play component that dynamically re-balances the contribution of each branch during training, promoting a more holistic learning paradigm. Extensive experiments demonstrate that MWAM can be seamlessly integrated into diverse architectural backbones, such as those based on CNNs and ViTs. Furthermore, MWAM delivers consistent performance gains across a wide range of tasks and modality combinations. This advancement extends beyond merely optimizing the performance of the base model; it also manifests as further performance improvements to state-of-the-art methods addressing the missing modality problem.
Target before Shooting: Accurate Anomaly Detection and Localization under One Millisecond via Cascade Patch Retrieval
Aug 13, 2023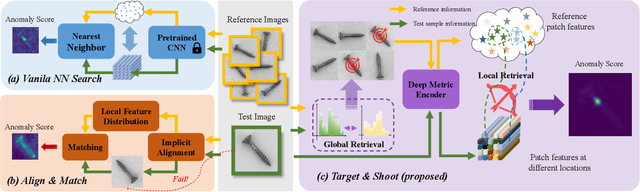
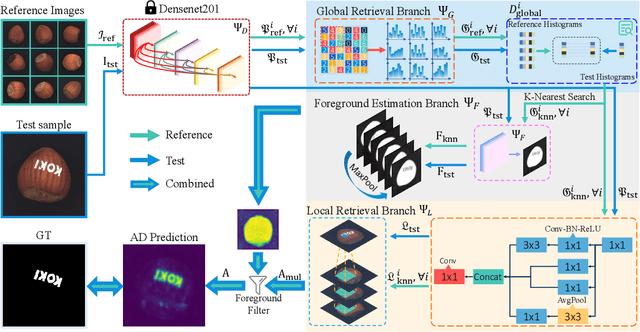
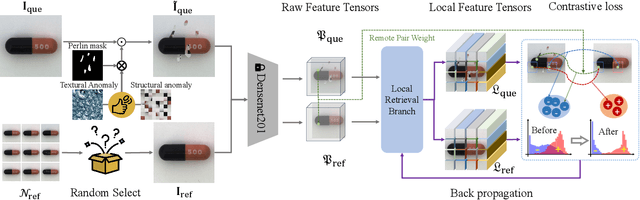
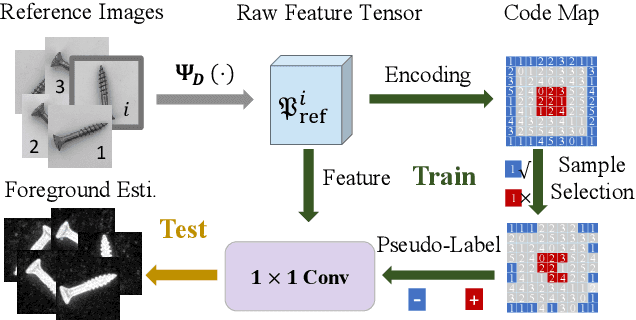
In this work, by re-examining the "matching" nature of Anomaly Detection (AD), we propose a new AD framework that simultaneously enjoys new records of AD accuracy and dramatically high running speed. In this framework, the anomaly detection problem is solved via a cascade patch retrieval procedure that retrieves the nearest neighbors for each test image patch in a coarse-to-fine fashion. Given a test sample, the top-K most similar training images are first selected based on a robust histogram matching process. Secondly, the nearest neighbor of each test patch is retrieved over the similar geometrical locations on those "global nearest neighbors", by using a carefully trained local metric. Finally, the anomaly score of each test image patch is calculated based on the distance to its "local nearest neighbor" and the "non-background" probability. The proposed method is termed "Cascade Patch Retrieval" (CPR) in this work. Different from the conventional patch-matching-based AD algorithms, CPR selects proper "targets" (reference images and locations) before "shooting" (patch-matching). On the well-acknowledged MVTec AD, BTAD and MVTec-3D AD datasets, the proposed algorithm consistently outperforms all the comparing SOTA methods by remarkable margins, measured by various AD metrics. Furthermore, CPR is extremely efficient. It runs at the speed of 113 FPS with the standard setting while its simplified version only requires less than 1 ms to process an image at the cost of a trivial accuracy drop. The code of CPR is available at https://github.com/flyinghu123/CPR.
Metric-aligned Sample Selection and Critical Feature Sampling for Oriented Object Detection
Jul 10, 2023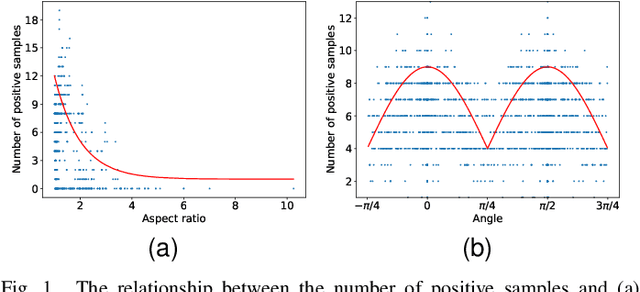
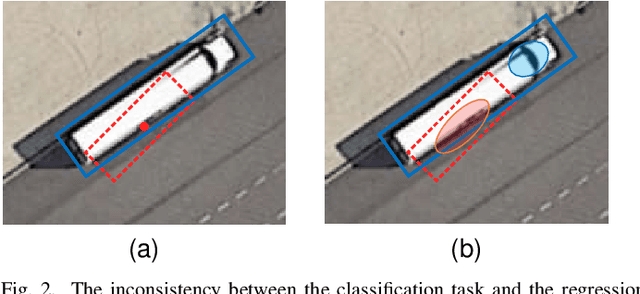
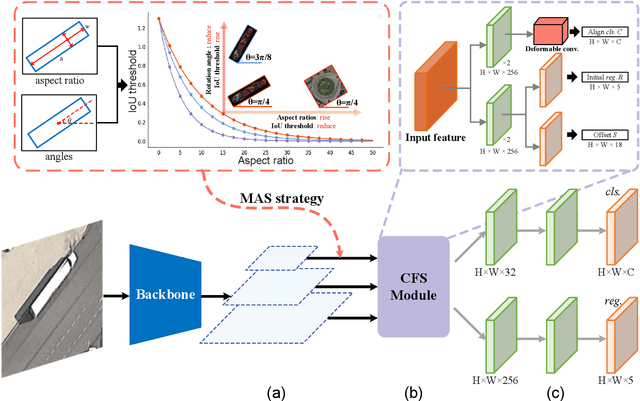
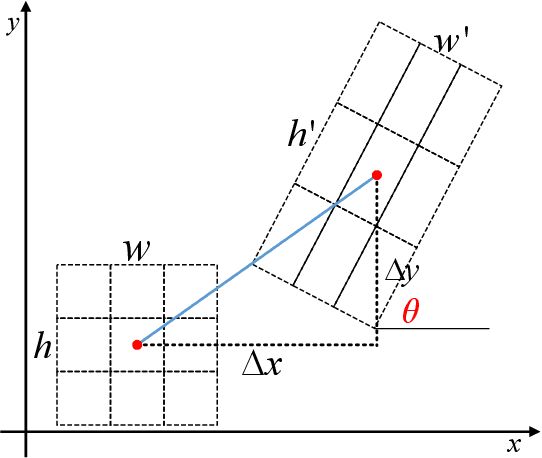
Arbitrary-oriented object detection is a relatively emerging but challenging task. Although remarkable progress has been made, there still remain many unsolved issues due to the large diversity of patterns in orientation, scale, aspect ratio, and visual appearance of objects in aerial images. Most of the existing methods adopt a coarse-grained fixed label assignment strategy and suffer from the inconsistency between the classification score and localization accuracy. First, to align the metric inconsistency between sample selection and regression loss calculation caused by fixed IoU strategy, we introduce affine transformation to evaluate the quality of samples and propose a distance-based label assignment strategy. The proposed metric-aligned selection (MAS) strategy can dynamically select samples according to the shape and rotation characteristic of objects. Second, to further address the inconsistency between classification and localization, we propose a critical feature sampling (CFS) module, which performs localization refinement on the sampling location for classification task to extract critical features accurately. Third, we present a scale-controlled smooth $L_1$ loss (SC-Loss) to adaptively select high quality samples by changing the form of regression loss function based on the statistics of proposals during training. Extensive experiments are conducted on four challenging rotated object detection datasets DOTA, FAIR1M-1.0, HRSC2016, and UCAS-AOD. The results show the state-of-the-art accuracy of the proposed detector.
Effective Pedestrian Detection Using Center-symmetric Local Binary/Trinary Patterns
Sep 17, 2010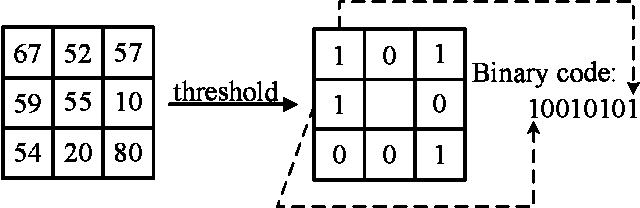
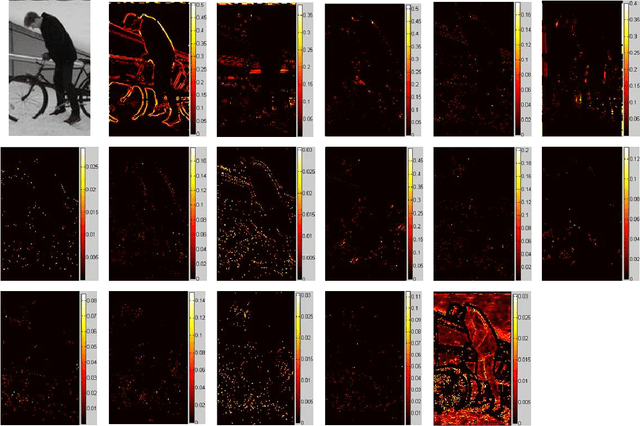
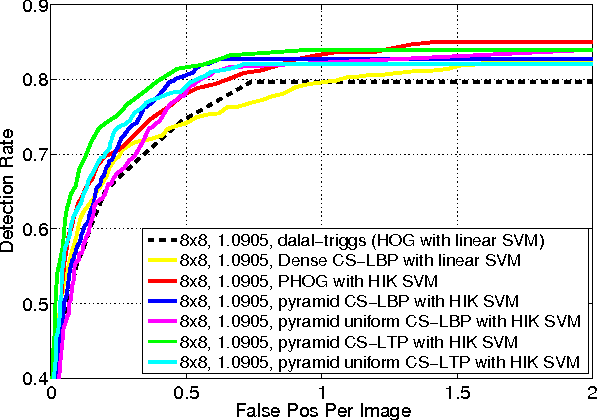
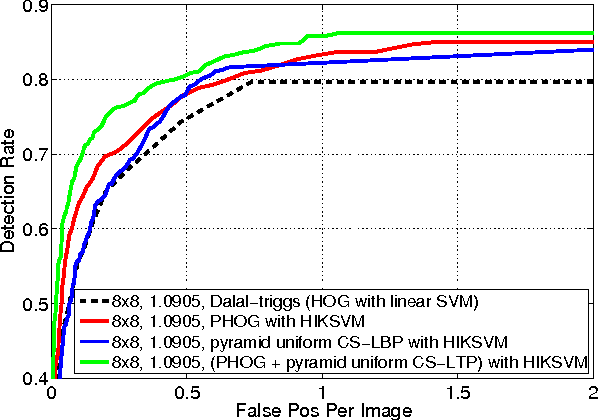
Accurately detecting pedestrians in images plays a critically important role in many computer vision applications. Extraction of effective features is the key to this task. Promising features should be discriminative, robust to various variations and easy to compute. In this work, we present novel features, termed dense center-symmetric local binary patterns (CS-LBP) and pyramid center-symmetric local binary/ternary patterns (CS-LBP/LTP), for pedestrian detection. The standard LBP proposed by Ojala et al. \cite{c4} mainly captures the texture information. The proposed CS-LBP feature, in contrast, captures the gradient information and some texture information. Moreover, the proposed dense CS-LBP and the pyramid CS-LBP/LTP are easy to implement and computationally efficient, which is desirable for real-time applications. Experiments on the INRIA pedestrian dataset show that the dense CS-LBP feature with linear supporct vector machines (SVMs) is comparable with the histograms of oriented gradients (HOG) feature with linear SVMs, and the pyramid CS-LBP/LTP features outperform both HOG features with linear SVMs and the start-of-the-art pyramid HOG (PHOG) feature with the histogram intersection kernel SVMs. We also demonstrate that the combination of our pyramid CS-LBP feature and the PHOG feature could significantly improve the detection performance-producing state-of-the-art accuracy on the INRIA pedestrian dataset.