 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffective Pedestrian Detection Using Center-symmetric Local Binary/Trinary Patterns
Paper and Code
Sep 17, 2010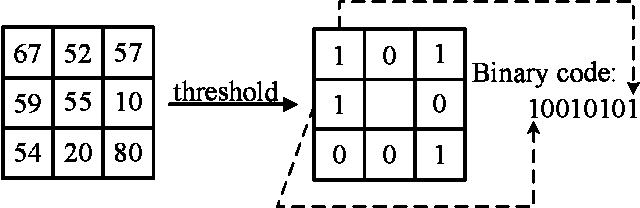
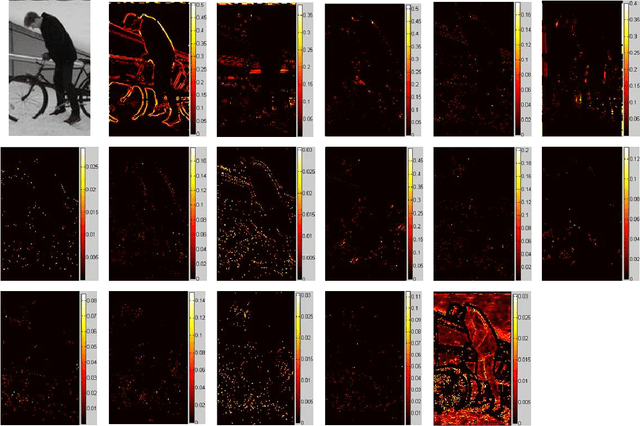
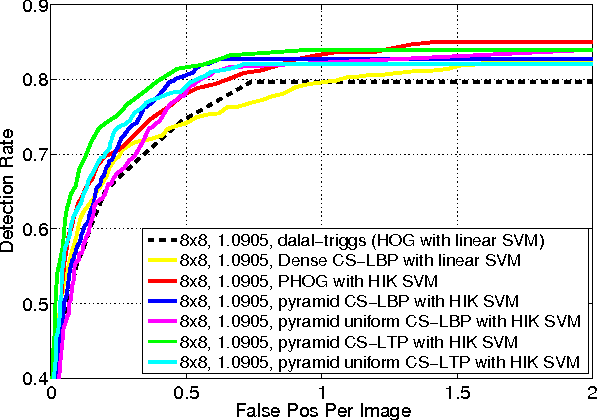
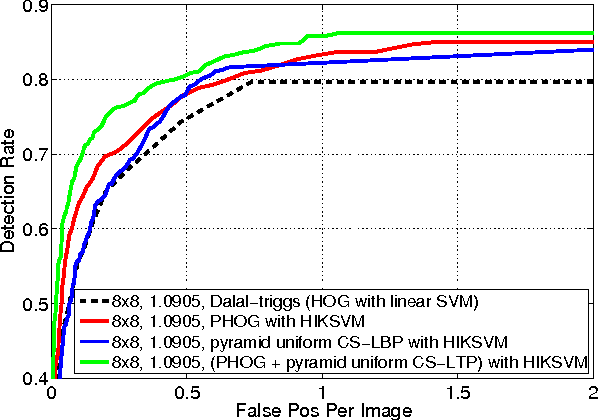
Accurately detecting pedestrians in images plays a critically important role in many computer vision applications. Extraction of effective features is the key to this task. Promising features should be discriminative, robust to various variations and easy to compute. In this work, we present novel features, termed dense center-symmetric local binary patterns (CS-LBP) and pyramid center-symmetric local binary/ternary patterns (CS-LBP/LTP), for pedestrian detection. The standard LBP proposed by Ojala et al. \cite{c4} mainly captures the texture information. The proposed CS-LBP feature, in contrast, captures the gradient information and some texture information. Moreover, the proposed dense CS-LBP and the pyramid CS-LBP/LTP are easy to implement and computationally efficient, which is desirable for real-time applications. Experiments on the INRIA pedestrian dataset show that the dense CS-LBP feature with linear supporct vector machines (SVMs) is comparable with the histograms of oriented gradients (HOG) feature with linear SVMs, and the pyramid CS-LBP/LTP features outperform both HOG features with linear SVMs and the start-of-the-art pyramid HOG (PHOG) feature with the histogram intersection kernel SVMs. We also demonstrate that the combination of our pyramid CS-LBP feature and the PHOG feature could significantly improve the detection performance-producing state-of-the-art accuracy on the INRIA pedestrian dataset.