 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Simulation of Time-energy Optimal Anti-swing Trajectory Planner for Autonomous Tower Cranes
Apr 08, 2024For autonomous crane lifting, optimal trajectories of the crane are required as reference inputs to the crane controller to facilitate feedforward control. Reducing the unactuated payload motion is a crucial issue for under-actuated tower cranes with spherical pendulum dynamics. The planned trajectory should be optimal in terms of both operating time and energy consumption, to facilitate optimum output spending optimum effort. This article proposes an anti-swing tower crane trajectory planner that can provide time-energy optimal solutions for the Computer-Aided Lift Planning (CALP) system developed at Nanyang Technological University, which facilitates collision-free lifting path planning of robotized tower cranes in autonomous construction sites. The current work introduces a trajectory planning module to the system that utilizes the geometric outputs from the path planning module and optimally scales them with time information. Firstly, analyzing the non-linear dynamics of the crane operations, the tower crane is established as differentially flat. Subsequently, the multi-objective trajectory optimization problems for all the crane operations are formulated in the flat output space through consideration of the mechanical and safety constraints. Two multi-objective evolutionary algorithms, namely Non-dominated Sorting Genetic Algorithm (NSGA-II) and Generalized Differential Evolution 3 (GDE3), are extensively compared via statistical measures based on the closeness of solutions to the Pareto front, distribution of solutions in the solution space and the runtime, to select the optimization engine of the planner. Finally, the crane operation trajectories are obtained via the corresponding planned flat output trajectories. Studies simulating real-world lifting scenarios are conducted to verify the effectiveness and reliability of the proposed module of the lift planning system.
Multi-objective Anti-swing Trajectory Planning of Double-pendulum Tower Crane Operations using Opposition-based Evolutionary Algorithm
May 30, 2023



Underactuated tower crane lifting requires time-energy optimal trajectories for the trolley/slew operations and reduction of the unactuated swings resulting from the trolley/jib motion. In scenarios involving non-negligible hook mass or long rig-cable, the hook-payload unit exhibits double-pendulum behaviour, making the problem highly challenging. This article introduces an offline multi-objective anti-swing trajectory planning module for a Computer-Aided Lift Planning (CALP) system of autonomous double-pendulum tower cranes, addressing all the transient state constraints. A set of auxiliary outputs are selected by methodically analyzing the payload swing dynamics and are used to prove the differential flatness property of the crane operations. The flat outputs are parameterized via suitable B\'{e}zier curves to formulate the multi-objective trajectory optimization problems in the flat output space. A novel multi-objective evolutionary algorithm called Collective Oppositional Generalized Differential Evolution 3 (CO-GDE3) is employed as the optimizer. To obtain faster convergence and better consistency in getting a wide range of good solutions, a new population initialization strategy is integrated into the conventional GDE3. The computationally efficient initialization method incorporates various concepts of computational opposition. Statistical comparisons based on trolley and slew operations verify the superiority of convergence and reliability of CO-GDE3 over the standard GDE3. Trolley and slew operations of a collision-free lifting path computed via the path planner of the CALP system are selected for a simulation study. The simulated trajectories demonstrate that the proposed planner can produce time-energy optimal solutions, keeping all the state variables within their respective limits and restricting the hook and payload swings.
DRAC: Diabetic Retinopathy Analysis Challenge with Ultra-Wide Optical Coherence Tomography Angiography Images
Apr 05, 2023



Computer-assisted automatic analysis of diabetic retinopathy (DR) is of great importance in reducing the risks of vision loss and even blindness. Ultra-wide optical coherence tomography angiography (UW-OCTA) is a non-invasive and safe imaging modality in DR diagnosis system, but there is a lack of publicly available benchmarks for model development and evaluation. To promote further research and scientific benchmarking for diabetic retinopathy analysis using UW-OCTA images, we organized a challenge named "DRAC - Diabetic Retinopathy Analysis Challenge" in conjunction with the 25th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI 2022). The challenge consists of three tasks: segmentation of DR lesions, image quality assessment and DR grading. The scientific community responded positively to the challenge, with 11, 12, and 13 teams from geographically diverse institutes submitting different solutions in these three tasks, respectively. This paper presents a summary and analysis of the top-performing solutions and results for each task of the challenge. The obtained results from top algorithms indicate the importance of data augmentation, model architecture and ensemble of networks in improving the performance of deep learning models. These findings have the potential to enable new developments in diabetic retinopathy analysis. The challenge remains open for post-challenge registrations and submissions for benchmarking future methodology developments.
MIDAS: Multi-sensorial Immersive Dynamic Autonomous System Improves Motivation of Stroke Affected Patients for Hand Rehabilitation
Mar 20, 2022
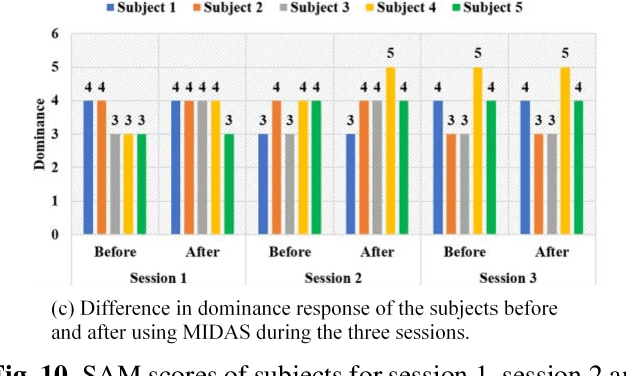
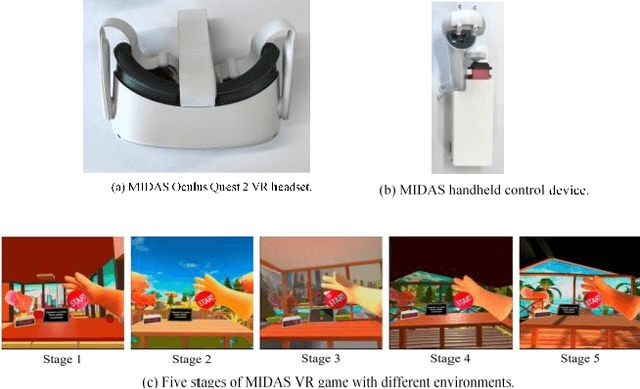
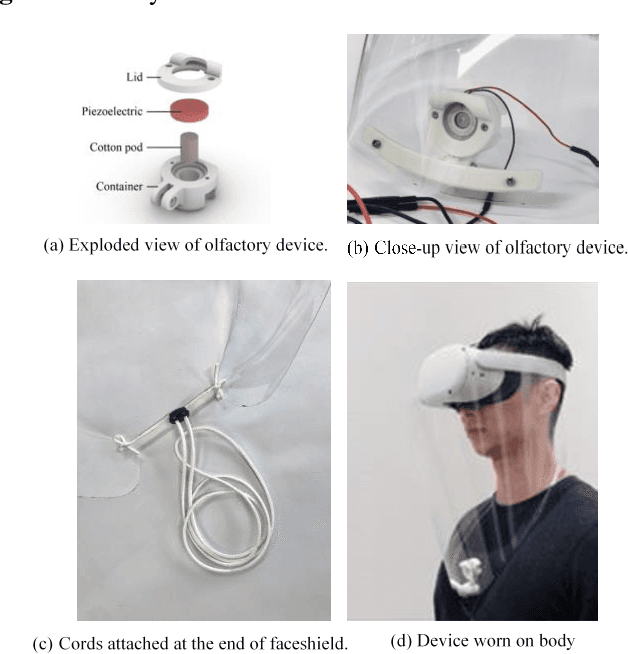
Majority of stroke survivors are left with poorly functioning paretic hands. Current rehabilitation devices have failed to motivate the patients enough to continue rehabilitation exercises. The objective of this project, MIDAS (Multi-sensorial Immersive Dynamic Autonomous System) is a proof of concept by using an immersive system to improve motivation of stroke patients for hand rehabilitation. MIDAS is intended for stroke patients who suffer from light to mild stroke. MIDAS is lightweight and portable. It consists of a hand exoskeleton subsystem, a Virtual Reality (VR) subsystem, and an olfactory subsystem. Altogether, MIDAS engages four out of five senses during rehabilitation. To evaluate the efficacy of MIDAS a pilot study consisting of three sessions is carried out on five stroke affected patients. Subsystems of MIDAS are added progressively in each session. The game environment, sonic effects, and scent released is carefully chosen to enhance the immersive experience. 60% of the scores of user experience are above 40 (out of 56). 96% Self Rehabilitation Motivation Scale (SRMS) rating shows that the participants are motivated to use MIDAS and 87% rating shows that MIDAS is exciting for rehabilitation. Participants experienced elevated motivation to continue stroke rehabilitation using MIDAS and no undesired side effects were reported.
Towards Robust Classification with Image Quality Assessment
Apr 14, 2020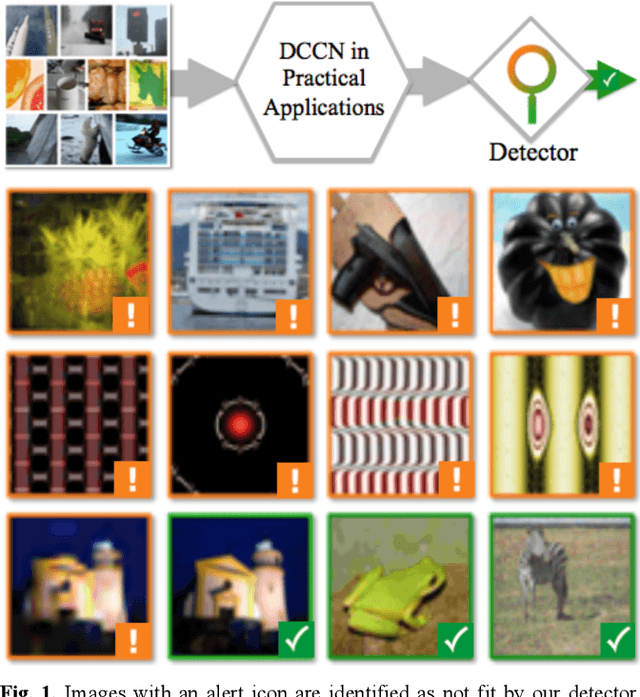
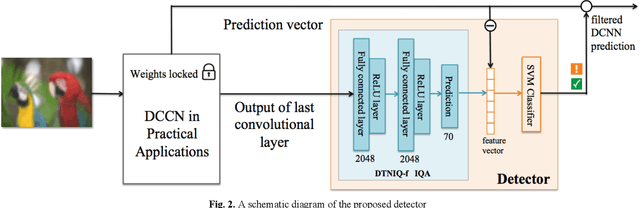


Recent studies have shown that deep convolutional neural networks (DCNN) are vulnerable to adversarial examples and sensitive to perceptual quality as well as the acquisition condition of images. These findings raise a big concern for the adoption of DCNN-based applications for critical tasks. In the literature, various defense strategies have been introduced to increase the robustness of DCNN, including re-training an entire model with benign noise injection, adversarial examples, or adding extra layers. In this paper, we investigate the connection between adversarial manipulation and image quality, subsequently propose a protective mechanism that doesnt require re-training a DCNN. Our method combines image quality assessment with knowledge distillation to detect input images that would trigger a DCCN to produce egregiously wrong results. Using the ResNet model trained on ImageNet as an example, we demonstrate that the detector can effectively identify poor quality and adversarial images.