 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHE-SLAM: a Stereo SLAM System Based on Histogram Equalization and ORB Features
Feb 09, 2019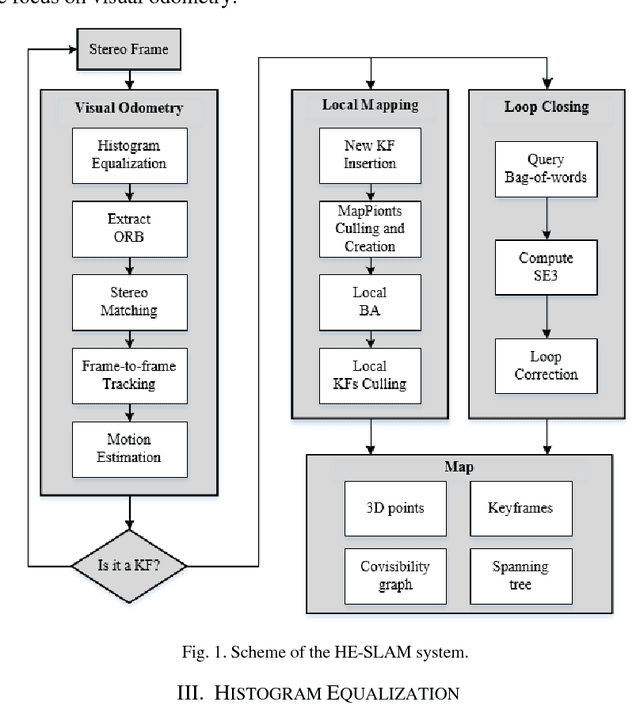
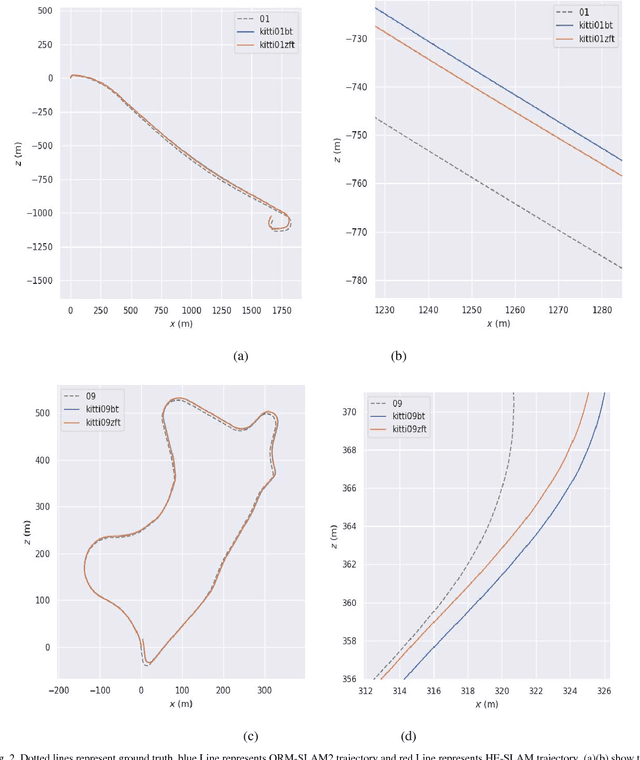
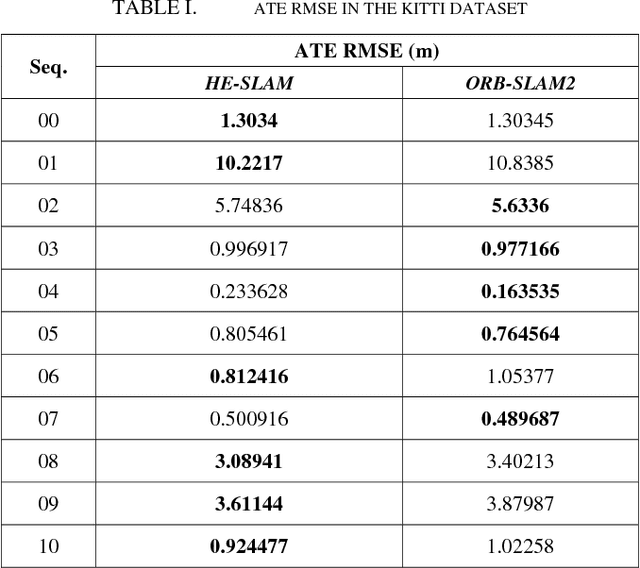
In the real-life environments, due to the sudden appearance of windows, lights, and objects blocking the light source, the visual SLAM system can easily capture the low-contrast images caused by over-exposure or over-darkness. At this time, the direct method of estimating camera motion based on pixel luminance information is infeasible, and it is often difficult to find enough valid feature points without image processing. This paper proposed HE-SLAM, a new method combining histogram equalization and ORB feature extraction, which can be robust in more scenes, especially in stages with low-contrast images. Because HE-SLAM uses histogram equalization to improve the contrast of images, it can extract enough valid feature points in low-contrast images for subsequent feature matching, keyframe selection, bundle adjustment, and loop closure detection. The proposed HE-SLAM has been tested on the popular datasets (such as KITTI and EuRoc), and the real-time performance and robustness of the system are demonstrated by comparing system runtime and the mean square root error (RMSE) of absolute trajectory error (ATE) with state-of-the-art methods like ORB-SLAM2.
Pose Flow: Efficient Online Pose Tracking
Jul 02, 2018



Multi-person articulated pose tracking in unconstrained videos is an important while challenging problem. In this paper, going along the road of top-down approaches, we propose a decent and efficient pose tracker based on pose flows. First, we design an online optimization framework to build the association of cross-frame poses and form pose flows (PF-Builder). Second, a novel pose flow non-maximum suppression (PF-NMS) is designed to robustly reduce redundant pose flows and re-link temporal disjoint ones. Extensive experiments show that our method significantly outperforms best-reported results on two standard Pose Tracking datasets by 13 mAP 25 MOTA and 6 mAP 3 MOTA respectively. Moreover, in the case of working on detected poses in individual frames, the extra computation of pose tracker is very minor, guaranteeing online 10FPS tracking. Our source codes are made publicly available(https://github.com/YuliangXiu/PoseFlow).
* Our source codes and models are made publicly available at https://github.com/YuliangXiu/PoseFlow and https://github.com/MVIG-SJTU/AlphaPose