 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDMCE: Diffusion Model Channel Enhancer for Multi-User Semantic Communication Systems
Jan 29, 2024



To achieve continuous massive data transmission with significantly reduced data payload, the users can adopt semantic communication techniques to compress the redundant information by transmitting semantic features instead. However, current works on semantic communication mainly focus on high compression ratio, neglecting the wireless channel effects including dynamic distortion and multi-user interference, which significantly limit the fidelity of semantic communication. To address this, this paper proposes a diffusion model (DM)-based channel enhancer (DMCE) for improving the performance of multi-user semantic communication, with the DM learning the particular data distribution of channel effects on the transmitted semantic features. In the considered system model, multiple users (such as road cameras) transmit semantic features of multi-source data to a receiver by applying the joint source-channel coding (JSCC) techniques, and the receiver fuses the semantic features from multiple users to complete specific tasks. Then, we propose DMCE to enhance the channel state information (CSI) estimation for improving the restoration of the received semantic features. Finally, the fusion results at the receiver are significantly enhanced, demonstrating a robust performance even under low signal-to-noise ratio (SNR) regimes, enabling the generation of effective object segmentation images. Extensive simulation results with a traffic scenario dataset show that the proposed scheme can improve the mean Intersection over Union (mIoU) by more than 25\% at low SNR regimes, compared with the benchmark schemes.
UAV Trajectory and Communication Co-design: Flexible Path Discretization and Path Compression
Oct 14, 2020
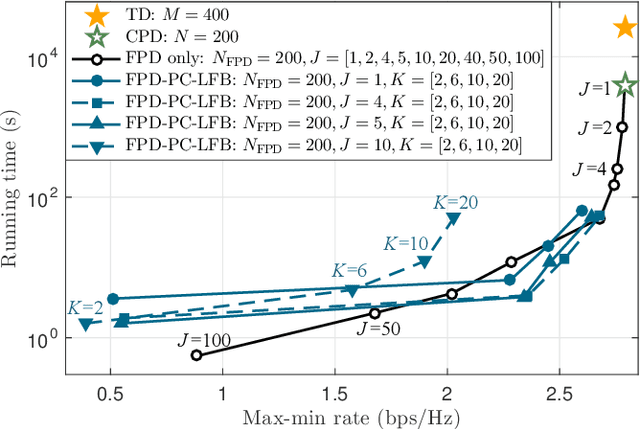
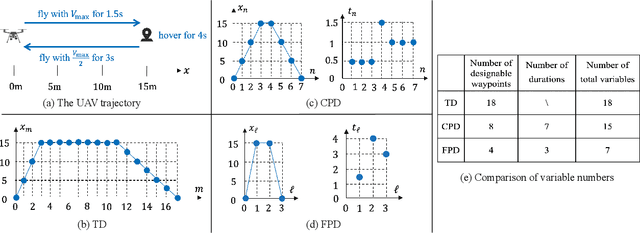
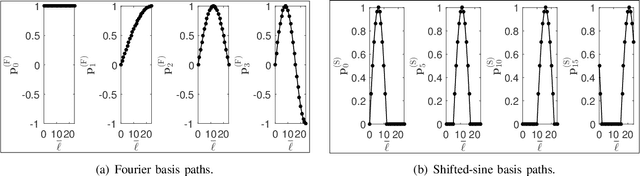
The performance optimization of UAV communication systems requires the joint design of UAV trajectory and communication efficiently. To tackle the challenge of infinite design variables arising from the continuous-time UAV trajectory optimization, a commonly adopted approach is by approximating the UAV trajectory with piecewise-linear path segments in three-dimensional (3D) space. However, this approach may still incur prohibitive computational complexity in practice when the UAV flight period/distance becomes long, as the distance between consecutive waypoints needs to be kept sufficiently small to retain high approximation accuracy. To resolve this fundamental issue, we propose in this paper a new and general framework for UAV trajectory and communication co-design. First, we propose a flexible path discretization scheme that optimizes only a number of selected waypoints (designable waypoints) along the UAV path for complexity reduction, while all the designable and non-designable waypoints are used in calculating the approximated communication utility along the UAV trajectory for ensuring high trajectory discretization accuracy. Next, given any number of designable waypoints, we propose a novel path compression scheme where the UAV 3D path is first decomposed into three one-dimensional (1D) sub-paths and each sub-path is then approximated by superimposing a number of selected basis paths weighted by their corresponding path coefficients, thus further reducing the path design complexity. Finally, we provide a case study on UAV trajectory design for aerial data harvesting from distributed ground sensors, and numerically show that the proposed schemes can significantly reduce the UAV trajectory design complexity yet achieve favorable rate performance as compared to conventional path/time discretization schemes.