 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIPD: Boosting Sequential Policy with Imaginary Planning Distillation in Offline Reinforcement Learning
Mar 04, 2026Decision transformer based sequential policies have emerged as a powerful paradigm in offline reinforcement learning (RL), yet their efficacy remains constrained by the quality of static datasets and inherent architectural limitations. Specifically, these models often struggle to effectively integrate suboptimal experiences and fail to explicitly plan for an optimal policy. To bridge this gap, we propose \textbf{Imaginary Planning Distillation (IPD)}, a novel framework that seamlessly incorporates offline planning into data generation, supervised training, and online inference. Our framework first learns a world model equipped with uncertainty measures and a quasi-optimal value function from the offline data. These components are utilized to identify suboptimal trajectories and augment them with reliable, imagined optimal rollouts generated via Model Predictive Control (MPC). A Transformer-based sequential policy is then trained on this enriched dataset, complemented by a value-guided objective that promotes the distillation of the optimal policy. By replacing the conventional, manually-tuned return-to-go with the learned quasi-optimal value function, IPD improves both decision-making stability and performance during inference. Empirical evaluations on the D4RL benchmark demonstrate that IPD significantly outperforms several state-of-the-art value-based and transformer-based offline RL methods across diverse tasks.
MeshMimic: Geometry-Aware Humanoid Motion Learning through 3D Scene Reconstruction
Feb 17, 2026Humanoid motion control has witnessed significant breakthroughs in recent years, with deep reinforcement learning (RL) emerging as a primary catalyst for achieving complex, human-like behaviors. However, the high dimensionality and intricate dynamics of humanoid robots make manual motion design impractical, leading to a heavy reliance on expensive motion capture (MoCap) data. These datasets are not only costly to acquire but also frequently lack the necessary geometric context of the surrounding physical environment. Consequently, existing motion synthesis frameworks often suffer from a decoupling of motion and scene, resulting in physical inconsistencies such as contact slippage or mesh penetration during terrain-aware tasks. In this work, we present MeshMimic, an innovative framework that bridges 3D scene reconstruction and embodied intelligence to enable humanoid robots to learn coupled "motion-terrain" interactions directly from video. By leveraging state-of-the-art 3D vision models, our framework precisely segments and reconstructs both human trajectories and the underlying 3D geometry of terrains and objects. We introduce an optimization algorithm based on kinematic consistency to extract high-quality motion data from noisy visual reconstructions, alongside a contact-invariant retargeting method that transfers human-environment interaction features to the humanoid agent. Experimental results demonstrate that MeshMimic achieves robust, highly dynamic performance across diverse and challenging terrains. Our approach proves that a low-cost pipeline utilizing only consumer-grade monocular sensors can facilitate the training of complex physical interactions, offering a scalable path toward the autonomous evolution of humanoid robots in unstructured environments.
Physics-informed Diffusion Mamba Transformer for Real-world Driving
Jan 31, 2026Autonomous driving systems demand trajectory planners that not only model the inherent uncertainty of future motions but also respect complex temporal dependencies and underlying physical laws. While diffusion-based generative models excel at capturing multi-modal distributions, they often fail to incorporate long-term sequential contexts and domain-specific physical priors. In this work, we bridge these gaps with two key innovations. First, we introduce a Diffusion Mamba Transformer architecture that embeds mamba and attention into the diffusion process, enabling more effective aggregation of sequential input contexts from sensor streams and past motion histories. Second, we design a Port-Hamiltonian Neural Network module that seamlessly integrates energy-based physical constraints into the diffusion model, thereby enhancing trajectory predictions with both consistency and interpretability. Extensive evaluations on standard autonomous driving benchmarks demonstrate that our unified framework significantly outperforms state-of-the-art baselines in predictive accuracy, physical plausibility, and robustness, thereby advancing safe and reliable motion planning.
Scalable Signal Temporal Logic Guided Reinforcement Learning via Value Function Space Optimization
Aug 04, 2024



The integration of reinforcement learning (RL) and formal methods has emerged as a promising framework for solving long-horizon planning problems. Conventional approaches typically involve abstraction of the state and action spaces and manually created labeling functions or predicates. However, the efficiency of these approaches deteriorates as the tasks become increasingly complex, which results in exponential growth in the size of labeling functions or predicates. To address these issues, we propose a scalable model-based RL framework, called VFSTL, which schedules pre-trained skills to follow unseen STL specifications without using hand-crafted predicates. Given a set of value functions obtained by goal-conditioned RL, we formulate an optimization problem to maximize the robustness value of Signal Temporal Logic (STL) defined specifications, which is computed using value functions as predicates. To further reduce the computation burden, we abstract the environment state space into the value function space (VFS). Then the optimization problem is solved by Model-Based Reinforcement Learning. Simulation results show that STL with value functions as predicates approximates the ground truth robustness and the planning in VFS directly achieves unseen specifications using data from sensors.
Sample-efficient Imitative Multi-token Decision Transformer for Generalizable Real World Driving
Jun 18, 2024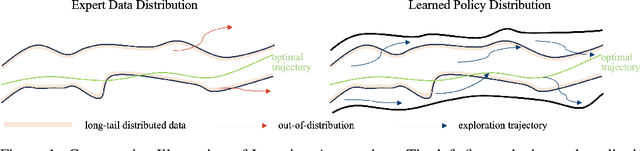
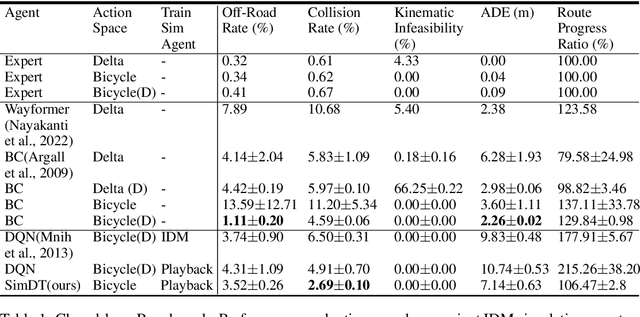
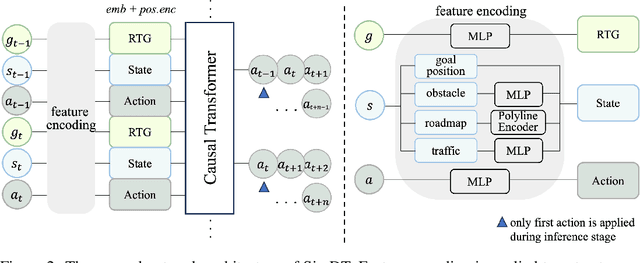

Reinforcement learning via sequence modeling has shown remarkable promise in autonomous systems, harnessing the power of offline datasets to make informed decisions in simulated environments. However, the full potential of such methods in complex dynamic environments remain to be discovered. In autonomous driving domain, learning-based agents face significant challenges when transferring knowledge from simulated to real-world settings and the performance is also significantly impacted by data distribution shift. To address these issue, we propose Sample-efficient Imitative Multi-token Decision Transformer (SimDT). SimDT introduces multi-token prediction, imitative online learning and prioritized experience replay to Decision Transformer. The performance is evaluated through empirical experiments and results exceed popular imitation and reinforcement learning algorithms on Waymax benchmark.
Enhance Planning with Physics-informed Safety Controllor for End-to-end Autonomous Driving
May 01, 2024Recent years have seen a growing research interest in applications of Deep Neural Networks (DNN) on autonomous vehicle technology. The trend started with perception and prediction a few years ago and it is gradually being applied to motion planning tasks. Despite the performance of networks improve over time, DNN planners inherit the natural drawbacks of Deep Learning. Learning-based planners have limitations in achieving perfect accuracy on the training dataset and network performance can be affected by out-of-distribution problem. In this paper, we propose FusionAssurance, a novel trajectory-based end-to-end driving fusion framework which combines physics-informed control for safety assurance. By incorporating Potential Field into Model Predictive Control, FusionAssurance is capable of navigating through scenarios that are not included in the training dataset and scenarios where neural network fail to generalize. The effectiveness of the approach is demonstrated by extensive experiments under various scenarios on the CARLA benchmark.