 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Integration of Large Language Models with Intelligent Robots
Apr 14, 2024In recent years, the integration of large language models (LLMs) has revolutionized the field of robotics, enabling robots to communicate, understand, and reason with human-like proficiency. This paper explores the multifaceted impact of LLMs on robotics, addressing key challenges and opportunities for leveraging these models across various domains. By categorizing and analyzing LLM applications within core robotics elements -- communication, perception, planning, and control -- we aim to provide actionable insights for researchers seeking to integrate LLMs into their robotic systems. Our investigation focuses on LLMs developed post-GPT-3.5, primarily in text-based modalities while also considering multimodal approaches for perception and control. We offer comprehensive guidelines and examples for prompt engineering, facilitating beginners' access to LLM-based robotics solutions. Through tutorial-level examples and structured prompt construction, we illustrate how LLM-guided enhancements can be seamlessly integrated into robotics applications. This survey serves as a roadmap for researchers navigating the evolving landscape of LLM-driven robotics, offering a comprehensive overview and practical guidance for harnessing the power of language models in robotics development.
Graph-based 3D Collision-distance Estimation Network with Probabilistic Graph Rewiring
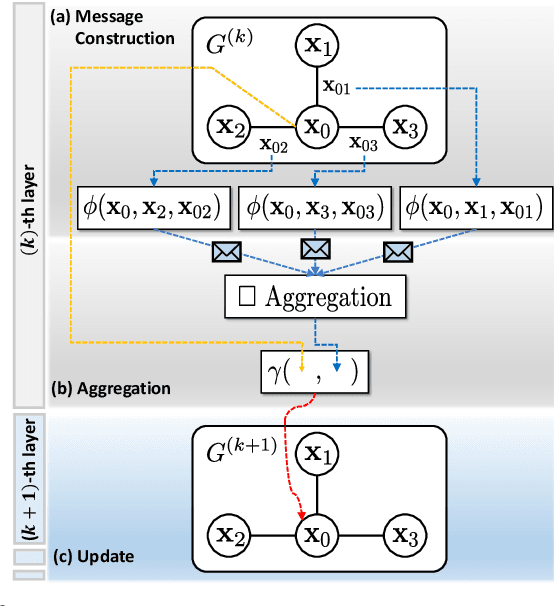
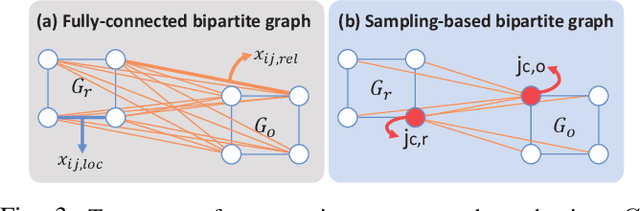
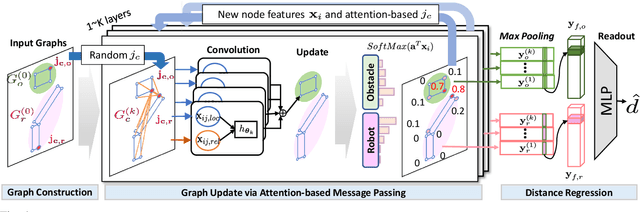
Oct 06, 2023We aim to solve the problem of data-driven collision-distance estimation given 3-dimensional (3D) geometries. Conventional algorithms suffer from low accuracy due to their reliance on limited representations, such as point clouds. In contrast, our previous graph-based model, GraphDistNet, achieves high accuracy using edge information but incurs higher message-passing costs with growing graph size, limiting its applicability to 3D geometries. To overcome these challenges, we propose GDN-R, a novel 3D graph-based estimation network.GDN-R employs a layer-wise probabilistic graph-rewiring algorithm leveraging the differentiable Gumbel-top-K relaxation. Our method accurately infers minimum distances through iterative graph rewiring and updating relevant embeddings. The probabilistic rewiring enables fast and robust embedding with respect to unforeseen categories of geometries. Through 41,412 random benchmark tasks with 150 pairs of 3D objects, we show GDN-R outperforms state-of-the-art baseline methods in terms of accuracy and generalizability. We also show that the proposed rewiring improves the update performance reducing the size of the estimation model. We finally show its batch prediction and auto-differentiation capabilities for trajectory optimization in both simulated and real-world scenarios.
SGGNet$^2$: Speech-Scene Graph Grounding Network for Speech-guided Navigation
Jul 14, 2023The spoken language serves as an accessible and efficient interface, enabling non-experts and disabled users to interact with complex assistant robots. However, accurately grounding language utterances gives a significant challenge due to the acoustic variability in speakers' voices and environmental noise. In this work, we propose a novel speech-scene graph grounding network (SGGNet$^2$) that robustly grounds spoken utterances by leveraging the acoustic similarity between correctly recognized and misrecognized words obtained from automatic speech recognition (ASR) systems. To incorporate the acoustic similarity, we extend our previous grounding model, the scene-graph-based grounding network (SGGNet), with the ASR model from NVIDIA NeMo. We accomplish this by feeding the latent vector of speech pronunciations into the BERT-based grounding network within SGGNet. We evaluate the effectiveness of using latent vectors of speech commands in grounding through qualitative and quantitative studies. We also demonstrate the capability of SGGNet$^2$ in a speech-based navigation task using a real quadruped robot, RBQ-3, from Rainbow Robotics.
GraphDistNet: A Graph-based Collision-distance Estimator for Gradient-based Trajectory
Jun 03, 2022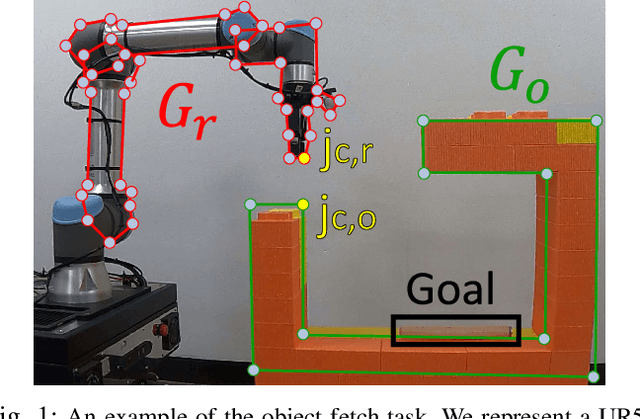
Trajectory optimization (TO) aims to find a sequence of valid states while minimizing costs. However, its fine validation process is often costly due to computationally expensive collision searches, otherwise coarse searches lower the safety of the system losing a precise solution. To resolve the issues, we introduce a new collision-distance estimator, GraphDistNet, that can precisely encode the structural information between two geometries by leveraging edge feature-based convolutional operations, and also efficiently predict a batch of collision distances and gradients through 25,000 random environments with a maximum of 20 unforeseen objects. Further, we show the adoption of attention mechanism enables our method to be easily generalized in unforeseen complex geometries toward TO. Our evaluation show GraphDistNet outperforms state-of-the-art baseline methods in both simulated and real world tasks.