 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeC2F-Space: Coarse-to-Fine Space Grounding for Spatial Instructions using Vision-Language Models
Nov 19, 2025Space grounding refers to localizing a set of spatial references described in natural language instructions. Traditional methods often fail to account for complex reasoning -- such as distance, geometry, and inter-object relationships -- while vision-language models (VLMs), despite strong reasoning abilities, struggle to produce a fine-grained region of outputs. To overcome these limitations, we propose C2F-Space, a novel coarse-to-fine space-grounding framework that (i) estimates an approximated yet spatially consistent region using a VLM, then (ii) refines the region to align with the local environment through superpixelization. For the coarse estimation, we design a grid-based visual-grounding prompt with a propose-validate strategy, maximizing VLM's spatial understanding and yielding physically and semantically valid canonical region (i.e., ellipses). For the refinement, we locally adapt the region to surrounding environment without over-relaxed to free space. We construct a new space-grounding benchmark and compare C2F-Space with five state-of-the-art baselines using success rate and intersection-over-union. Our C2F-Space significantly outperforms all baselines. Our ablation study confirms the effectiveness of each module in the two-step process and their synergistic effect of the combined framework. We finally demonstrate the applicability of C2F-Space to simulated robotic pick-and-place tasks.
A Survey on Integration of Large Language Models with Intelligent Robots
Apr 14, 2024In recent years, the integration of large language models (LLMs) has revolutionized the field of robotics, enabling robots to communicate, understand, and reason with human-like proficiency. This paper explores the multifaceted impact of LLMs on robotics, addressing key challenges and opportunities for leveraging these models across various domains. By categorizing and analyzing LLM applications within core robotics elements -- communication, perception, planning, and control -- we aim to provide actionable insights for researchers seeking to integrate LLMs into their robotic systems. Our investigation focuses on LLMs developed post-GPT-3.5, primarily in text-based modalities while also considering multimodal approaches for perception and control. We offer comprehensive guidelines and examples for prompt engineering, facilitating beginners' access to LLM-based robotics solutions. Through tutorial-level examples and structured prompt construction, we illustrate how LLM-guided enhancements can be seamlessly integrated into robotics applications. This survey serves as a roadmap for researchers navigating the evolving landscape of LLM-driven robotics, offering a comprehensive overview and practical guidance for harnessing the power of language models in robotics development.
LINGO-Space: Language-Conditioned Incremental Grounding for Space
Feb 02, 2024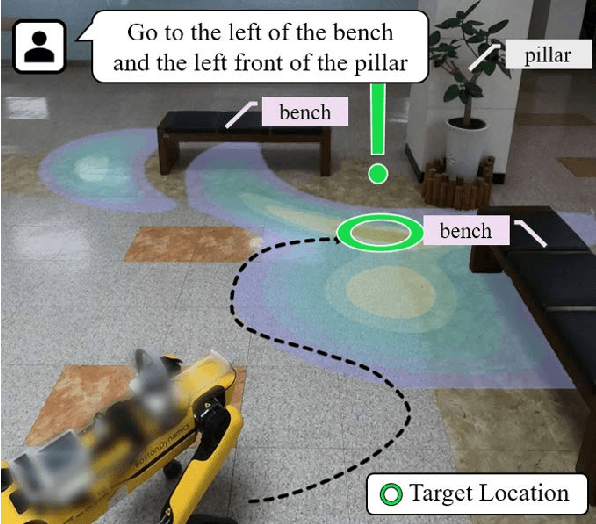
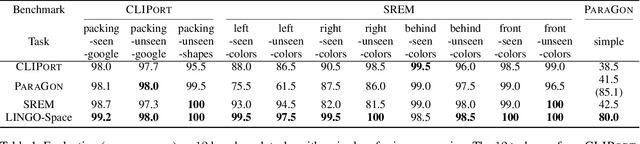
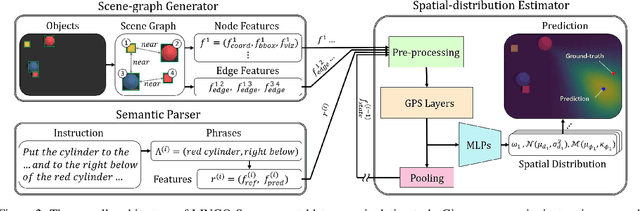
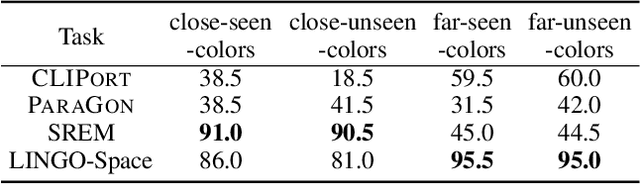
We aim to solve the problem of spatially localizing composite instructions referring to space: space grounding. Compared to current instance grounding, space grounding is challenging due to the ill-posedness of identifying locations referred to by discrete expressions and the compositional ambiguity of referring expressions. Therefore, we propose a novel probabilistic space-grounding methodology (LINGO-Space) that accurately identifies a probabilistic distribution of space being referred to and incrementally updates it, given subsequent referring expressions leveraging configurable polar distributions. Our evaluations show that the estimation using polar distributions enables a robot to ground locations successfully through $20$ table-top manipulation benchmark tests. We also show that updating the distribution helps the grounding method accurately narrow the referring space. We finally demonstrate the robustness of the space grounding with simulated manipulation and real quadruped robot navigation tasks. Code and videos are available at https://lingo-space.github.io.