 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgemmFlux: Crowd Flow Analytics with Commodity mmWave MIMO Radar
Jul 09, 2025In this paper, we present a novel framework for extracting underlying crowd motion patterns and inferring crowd semantics using mmWave radar. First, our proposed signal processing pipeline combines optical flow estimation concepts from vision with novel statistical and morphological noise filtering to generate high-fidelity mmWave flow fields - compact 2D vector representations of crowd motion. We then introduce a novel approach that transforms these fields into directed geometric graphs, where edges capture dominant flow currents, vertices mark crowd splitting or merging, and flow distribution is quantified across edges. Finally, we show that by analyzing the local Jacobian and computing the corresponding curl and divergence, we can extract key crowd semantics for both structured and diffused crowds. We conduct 21 experiments on crowds of up to (and including) 20 people across 3 areas, using commodity mmWave radar. Our framework achieves high-fidelity graph reconstruction of the underlying flow structure, even for complex crowd patterns, demonstrating strong spatial alignment and precise quantitative characterization of flow split ratios. Finally, our curl and divergence analysis accurately infers key crowd semantics, e.g., abrupt turns, boundaries where flow directions shift, dispersions, and gatherings. Overall, these findings validate our framework, underscoring its potential for various crowd analytics applications.
Embracing Diffraction: A Paradigm Shift in Wireless Sensing and Communication
May 02, 2025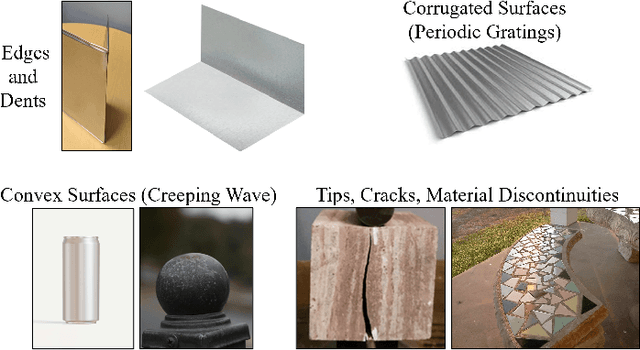
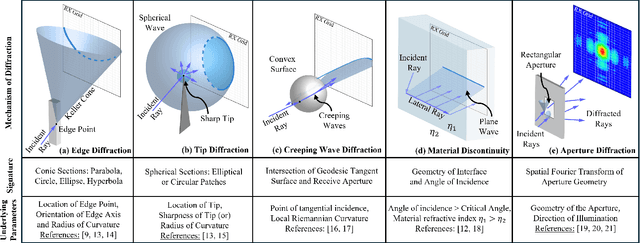
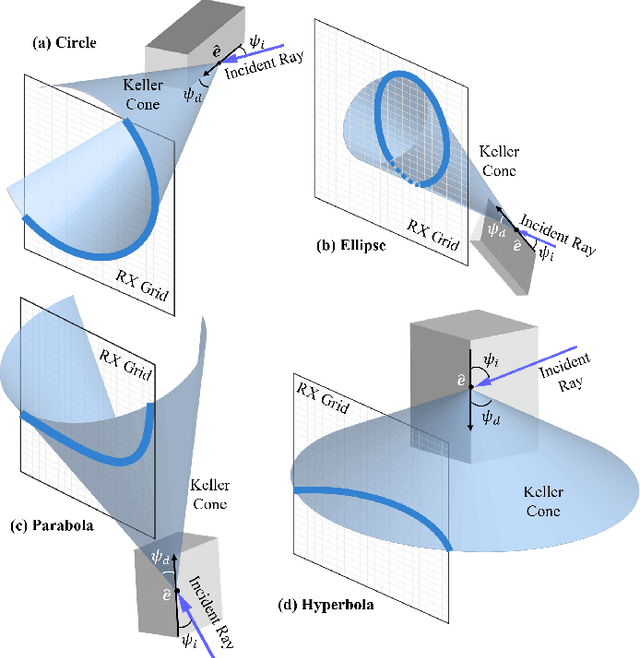
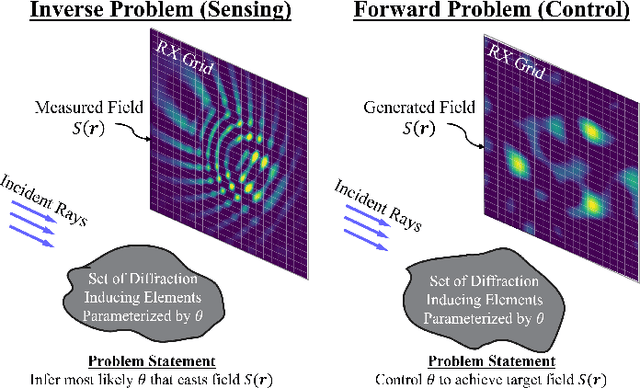
Wireless signals are integral to modern society, enabling both communication and increasingly, environmental sensing. While various propagation models exist, ranging from empirical methods to full-wave simulations, the phenomenon of electromagnetic diffraction is often treated as a secondary effect or a correction factor. This paper positions diffraction as a fundamentally important and underutilized mechanism that is rich with information about the physical environment. Specifically, diffraction-inducing elements generate distinct signatures that are rich with information about their underlying properties such as their geometries. We then argue that by understanding and exploiting these relationships, diffraction can be harnessed strategically. We introduce a general optimization framework to formalize this concept, illustrating how diffraction can be leveraged for both inverse problems (sensing scene details such as object geometries from measured fields) and forward problems (shaping RF fields for communication objectives by configuring diffracting elements). Focusing primarily on edge diffraction and Keller's Geometrical Theory of Diffraction (GTD), we discuss specific applications in RF sensing for scene understanding and in communications for RF field programming, drawing upon recent work. Overall, this paper lays out a vision for systematically incorporating diffraction into the design and operation of future wireless systems, paving the way for enhanced sensing capabilities and more robust communication strategies.
mmSnap: Bayesian One-Shot Fusion in a Self-Calibrated mmWave Radar Network
May 01, 2025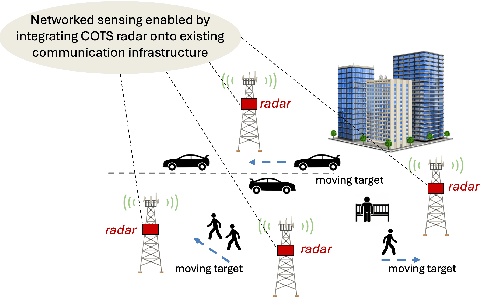
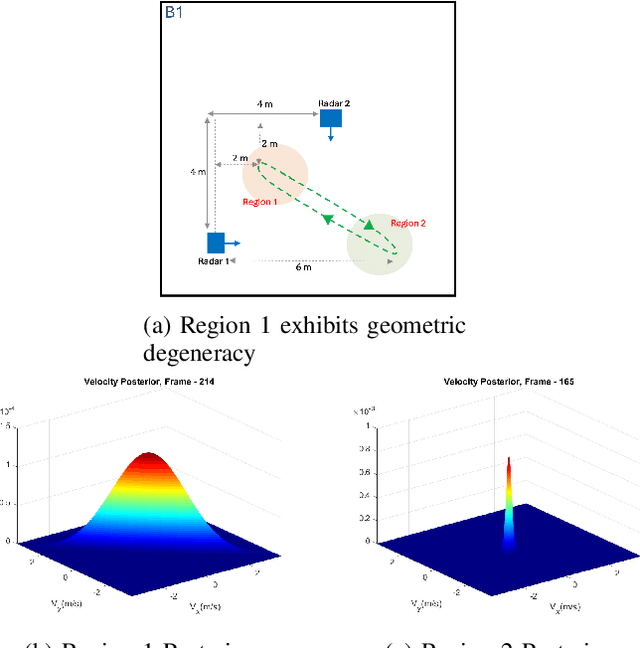
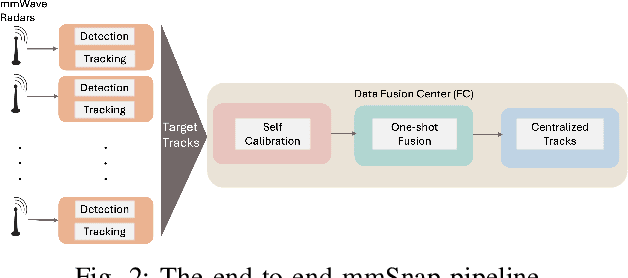

We present mmSnap, a collaborative RF sensing framework using multiple radar nodes, and demonstrate its feasibility and efficacy using commercially available mmWave MIMO radars. Collaborative fusion requires network calibration, or estimates of the relative poses (positions and orientations) of the sensors. We experimentally validate a self-calibration algorithm developed in our prior work, which estimates relative poses in closed form by least squares matching of target tracks within the common field of view (FoV). We then develop and demonstrate a Bayesian framework for one-shot fusion of measurements from multiple calibrated nodes, which yields instantaneous estimates of position and velocity vectors that match smoothed estimates from multi-frame tracking. Our experiments, conducted outdoors with two radar nodes tracking a moving human target, validate the core assumptions required to develop a broader set of capabilities for networked sensing with opportunistically deployed nodes.
Gait Disorder Assessment Based on a Large-Scale Clinical Trial: WiFi vs. Video vs. Doctor's Visual Inspection
Feb 07, 2025



Neurological gait disorders can affect a large population, with devastating consequences on the quality of life. In this paper, we are interested in fundamentally understanding the potential of emerging sensing modalities (e.g., WiFi) for neurological gait disorder assessment. Towards this goal, we conduct a one-year-long clinical trial in collaboration with the Neurology Associates of Santa Barbara, the results of which are detailed in this paper. More specifically, our medical campaign encompasses 114 real subjects and a wide spectrum of disorders (e.g., Parkinson's, Neuropathy, Post Stroke, Dementia, and Arthritis). We then develop the first WiFi-based gait disorder sensing system of its kind, distinguished by its scope of validation with a large and diverse patient cohort. To ensure generalizability, we mainly leverage publicly-accessible online videos of gait disorders for training, and develop a video-to-RF pipeline to convert them to synthetic RF data. We then extensively test the system in a neurology center (i.e., the Neurology Associates of Santa Barbara). In addition, we provide a 1-1 comparison with a vision-based system, by developing a vision-based gait disorder assessment system under the same exact conditions (e.g., same subjects, etc), a comparison crucial for developing smart health systems and the first of its kind to our knowledge. We finally contrast both systems with the accuracy of neurologists when basing evaluation solely on the visual inspection of the gait, by designing a large survey and distributing it to an extensive network of neurologists, thus offering the first such apples-to-apples comparison of these three sensing modalities. Overall, the findings can shape the integration of new sensing modalities into medical practice, and pave the way toward equitable healthcare.
Crowd Size Estimation for Non-Uniform Spatial Distributions with mmWave Radar
Oct 11, 2024



Sensing with RF signals such as mmWave radar has gained considerable interest in recent years. This is particularly relevant to 6G networks, which aim to integrate sensing and communication (ISAC) capabilities for enhanced functionality. The contextual information provided by such sensing, whether collected by standalone non-ISAC units or integrated within ISAC, can not only optimize cellular network assets but can also serve as a valuable tool for a wide range of applications beyond network optimization. In this context, we present a novel methodology for crowd size estimation using monostatic mmWave radar, which is capable of accurately counting large crowds that are unevenly distributed across space. Our estimation approach relies on the rigorous derivation of occlusion probabilities, which are then used to mathematically characterize the probability distributions that describe the number of agents visible to the radar as a function of the crowd size. We then estimate the true crowd size by comparing these derived mathematical models to the empirical distribution of the number of visible agents detected by the radar. This method requires minimal sensing capabilities (e.g., angle-of-arrival information is not needed), thus being well suited for either a dedicated mmWave radar or an ISAC system. Extensive numerical simulations validate our methodology, demonstrating strong performance across diverse spatial distributions and for crowd sizes of up to (and including) 30 agents. We achieve a mean absolute error (MAE) of 0.48 agents, significantly outperforming a baseline which assumes that the agents are uniformly distributed in the area. Overall, our approach holds significant promise for a variety of applications including network resource allocation, crowd management, and urban planning.
Optimization of Mobile Robotic Relay Operation for Minimal Average Wait Time
Aug 23, 2022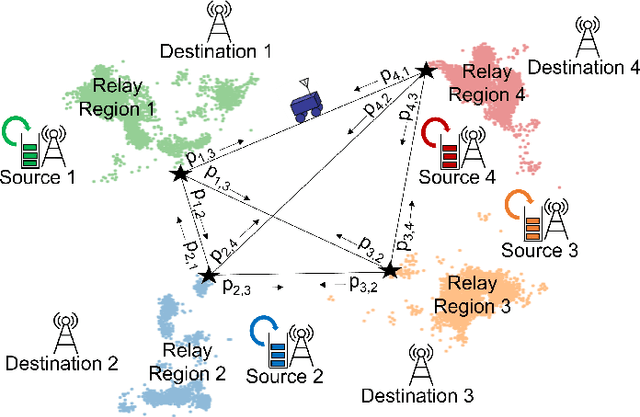
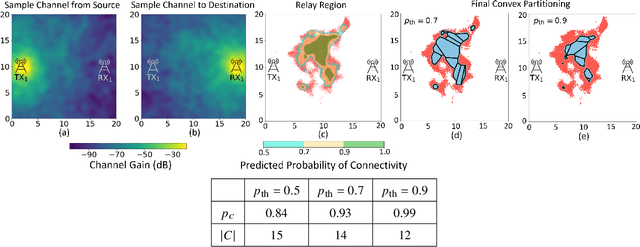
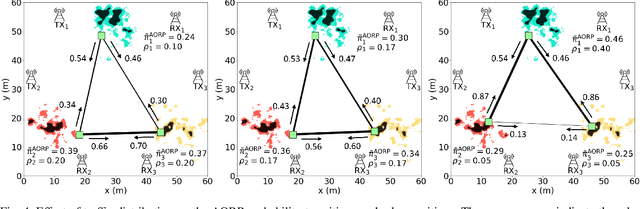
This paper considers trajectory planning for a mobile robot which persistently relays data between pairs of far-away communication nodes. Data accumulates stochastically at each source, and the robot must move to appropriate positions to enable data offload to the corresponding destination. The robot needs to minimize the average time that data waits at a source before being serviced. We are interested in finding optimal robotic routing policies consisting of 1) locations where the robot stops to relay (relay positions) and 2) conditional transition probabilities that determine the sequence in which the pairs are serviced. We first pose this problem as a non-convex problem that optimizes over both relay positions and transition probabilities. To find approximate solutions, we propose a novel algorithm which alternately optimizes relay positions and transition probabilities. For the former, we find efficient convex partitions of the non-convex relay regions, then formulate a mixed-integer second-order cone problem. For the latter, we find optimal transition probabilities via sequential least squares programming. We extensively analyze the proposed approach and mathematically characterize important system properties related to the robot's long-term energy consumption and service rate. Finally, through extensive simulation with real channel parameters, we verify the efficacy of our approach.
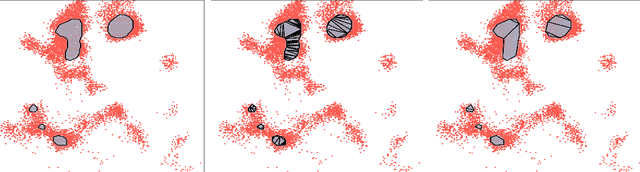
A Foundation for Wireless Channel Prediction and Full Ray Makeup Estimation Using an Unmanned Vehicle
Feb 20, 2022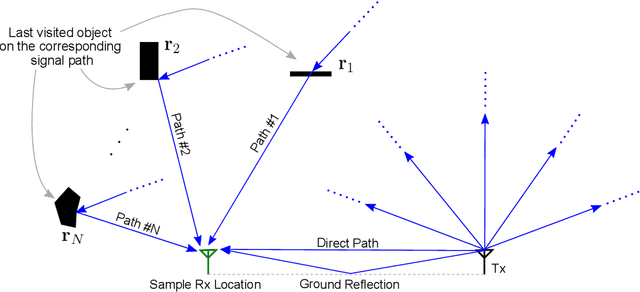
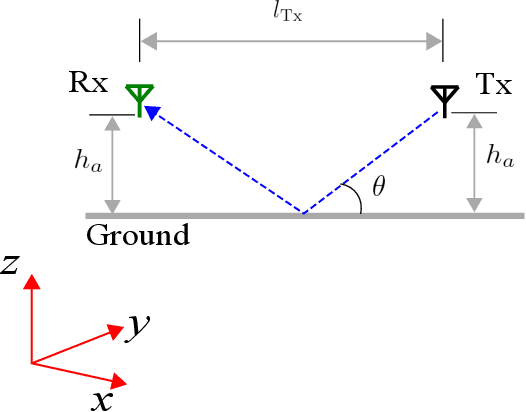
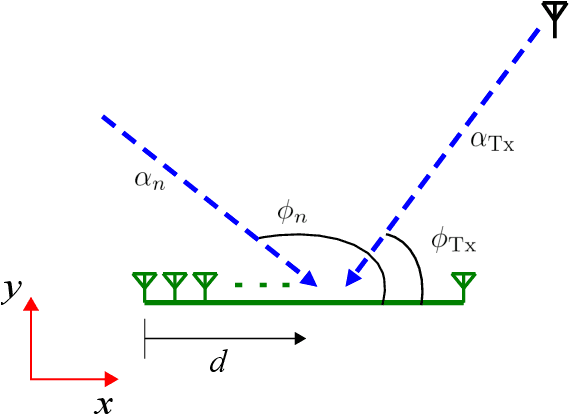
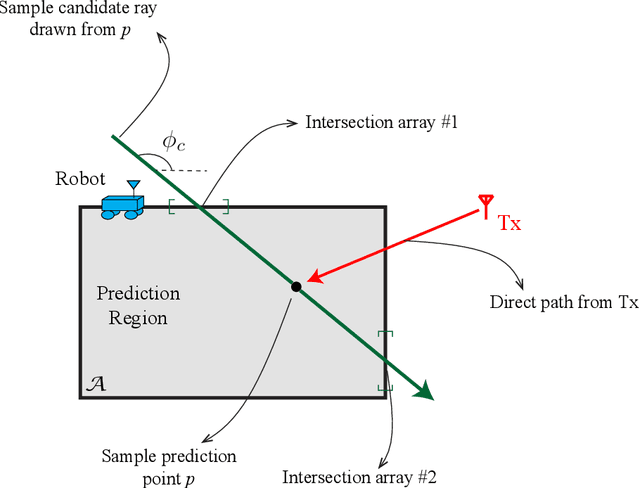
In this paper, we consider the problem of wireless channel prediction, where we are interested in predicting the channel quality at unvisited locations in an area of interest, based on a small number of prior received power measurements collected by an unmanned vehicle in the area. We propose a new framework for channel prediction that can not only predict the detailed variations of the received power, but can also predict the detailed makeup of the wireless rays (i.e., amplitude, angle-of-arrival, and phase of all the incoming paths). More specifically, we show how an enclosure-based robotic route design ensures that the received power measurements at the prior measurement locations can be utilized to fully predict detailed ray parameters at unvisited locations. We then show how to first estimate the detailed ray parameters at the prior measurement route and then fully extend them to predict the detailed ray makeup at unvisited locations in the workspace. We experimentally validate our proposed framework through extensive real-world experiments in three different areas, and show that our approach can accurately predict the received channel power and the detailed makeup of the rays at unvisited locations in an area, considerably outperforming the state-of-the-art in wireless channel prediction.
Nocturnal Seizure Detection Using Off-the-Shelf WiFi
Mar 25, 2021
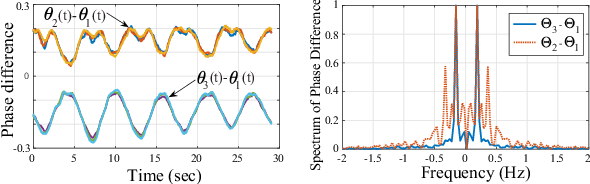
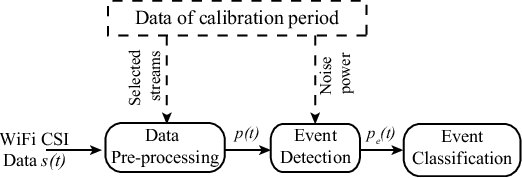

Detection of nocturnal seizures in epilepsy patients is essential, both for the quick management of the seizure complications, and for the assessment of the ongoing seizure treatment. Traditional seizure detection products (e.g., wearables), however, are either very costly, uncomfortable, or unreliable. In this paper, we then propose to utilize everyday WiFi signals for robust, fast, and non-invasive detection of nocturnal seizures. We first present a new and rigorous mathematical characterization for the spectral content/bandwidth of the WiFi signal, measured on a WiFi device placed near a sleeping patient, during different kinds of sleep motions: seizures, normal movements (e.g. posture adjustments), and breathing. Based on this mathematical modeling, we propose a novel pipeline for processing the received WiFi signals to robustly detect all nocturnal non-breathing movements, and then classify them into normal body movements or seizures. In order to validate this, we carry out extensive experiments in 7 different typical bedroom locations, where a set of 20 actors simulate the state of having seizures (total of 260 instances), as well as normal sleep movements (total of 410 instances). Our proposed system detects 93.85% of the seizures with a mean response time of only 5.69 seconds since the onset of the seizure. Moreover, our proposed system achieves a probability of false alarm of only 0.0097, when classifying normal sleep movements. Overall, our new mathematical modeling and experimental results show the great potential the ubiquitous WiFi signals have for detecting nocturnal seizures, which can provide better support for epilepsy patients and their caregivers.
Path Planning for Minimizing the Expected Cost until Success
Aug 20, 2018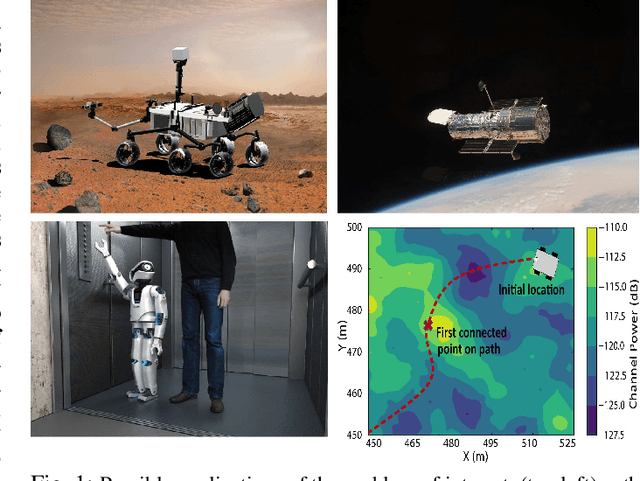
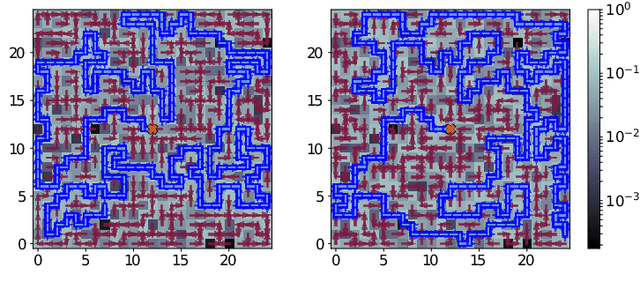
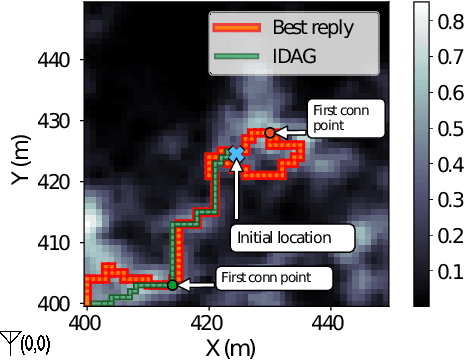
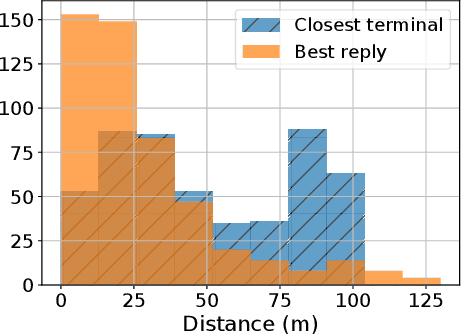
Consider a general path planning problem of a robot on a graph with edge costs, and where each node has a Boolean value of success or failure (with respect to some task) with a given probability. The objective is to plan a path for the robot on the graph that minimizes the expected cost until success. In this paper, it is our goal to bring a foundational understanding to this problem. We start by showing how this problem can be optimally solved by formulating it as an infinite horizon Markov Decision Process, but with an exponential space complexity. We then formally prove its NP-hardness. To address the space complexity, we then propose a path planner, using a game-theoretic framework, that asymptotically gets arbitrarily close to the optimal solution. Moreover, we also propose two fast and non-myopic path planners. To show the performance of our framework, we do extensive simulations for two scenarios: a rover on Mars searching for an object for scientific studies, and a robot looking for a connected spot to a remote station (with real data from downtown San Francisco). Our numerical results show a considerable performance improvement over existing state-of-the-art approaches.
Statistics of the Distance Traveled until Connectivity for Unmanned Vehicles
Aug 07, 2018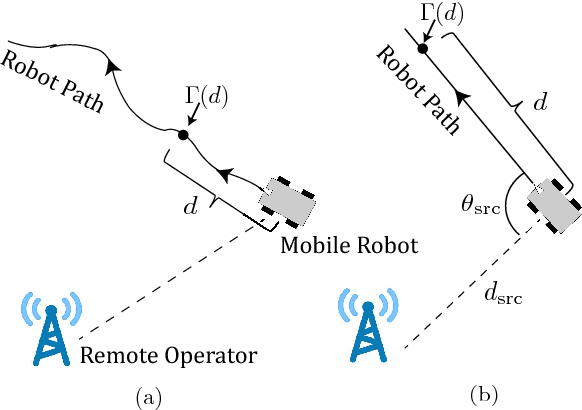
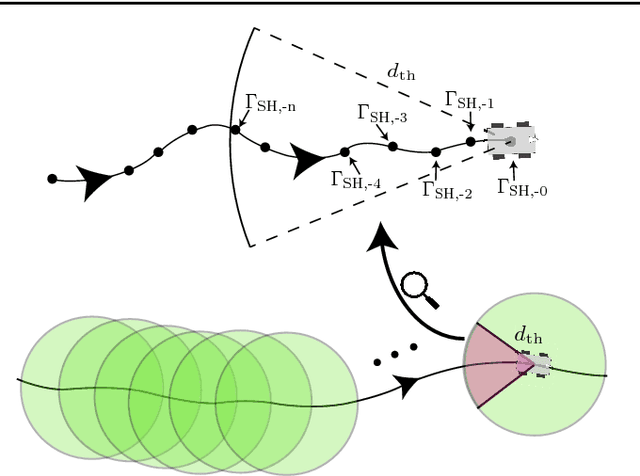
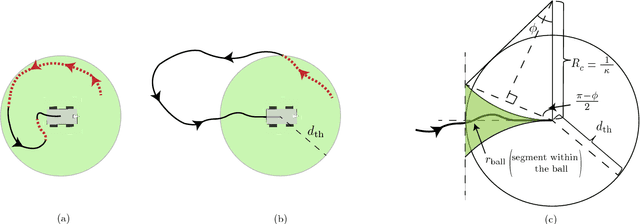
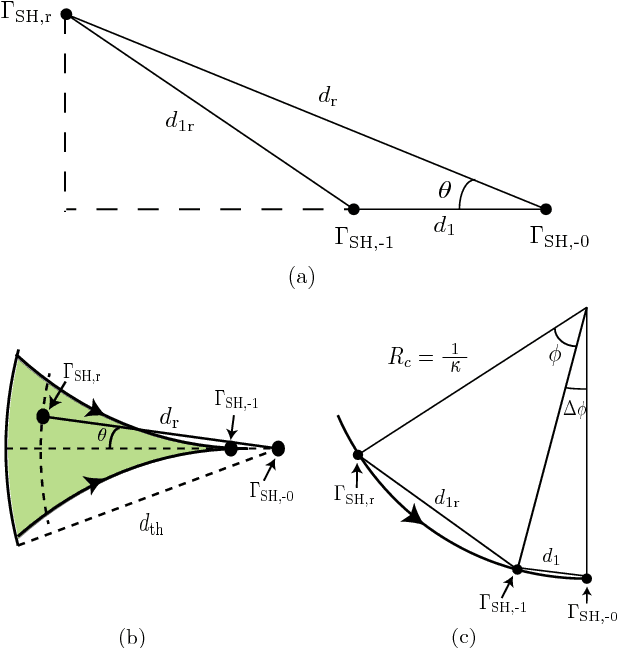
In this paper, we consider a scenario where a robot needs to establish connectivity with a remote operator or another robot, as it moves along a path. We are interested in answering the following question: what is the distance traveled by the robot along the path before it finds a connected spot? More specifically, we are interested in characterizing the statistics of the distance traveled along the path before it gets connected, in realistic channel environments experiencing path loss, shadowing and multipath effects. We develop an exact mathematical analysis of these statistics for straight-line paths and also mathematically characterize a more general space of paths (beyond straight paths) for which the analysis holds, based on the properties of the path such as its curvature. Finally, we confirm our theoretical analysis using extensive numerical results with real channel parameters from downtown San Francisco.