 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStatistics of the Distance Traveled until Connectivity for Unmanned Vehicles
Paper and Code
Aug 07, 2018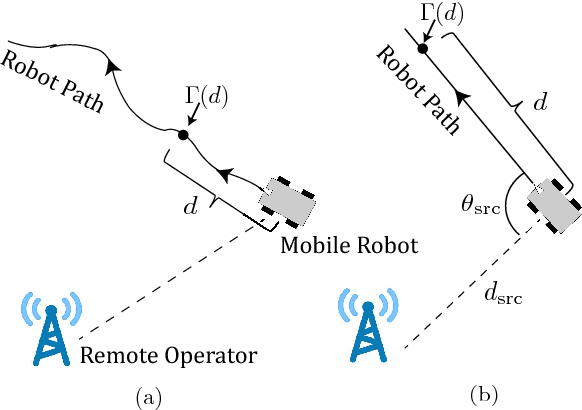
In this paper, we consider a scenario where a robot needs to establish connectivity with a remote operator or another robot, as it moves along a path. We are interested in answering the following question: what is the distance traveled by the robot along the path before it finds a connected spot? More specifically, we are interested in characterizing the statistics of the distance traveled along the path before it gets connected, in realistic channel environments experiencing path loss, shadowing and multipath effects. We develop an exact mathematical analysis of these statistics for straight-line paths and also mathematically characterize a more general space of paths (beyond straight paths) for which the analysis holds, based on the properties of the path such as its curvature. Finally, we confirm our theoretical analysis using extensive numerical results with real channel parameters from downtown San Francisco.