 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTaR-KV: Spatio-Temporal Adaptive Re-weighting for KV Cache Compression in GUI Vision-Language Models
Jun 01, 2026Vision-language-model-based graphical user interface (GUI) agents have shown broad automation capabilities, yet deployment is bottlenecked by a key-value (KV) cache that grows linearly with interaction steps. For instance, UI-TARS-1.5-7B consumes 76 GB of GPU memory on merely five screenshots, approaching the capacity of mainstream 80 GB accelerators. Existing KV compression methods share two structural assumptions: aggregating visual-token importance into a single shared saliency map, and applying a fixed top-B cutoff to the fused score distribution. Pilot measurements refute both: spatial specialization lives at the attention-subspace level and migrates across layers, while the score distribution drifts in shape along a trajectory. We propose STaR-KV (Spatio-Temporal Adaptive Re-weighting), a training-free KV cache compression framework that calibrates token importance along three axes: (i) subspace-aware scoring driven by online spatial mutual information; (ii) a temporal stability discount that suppresses redundant cache entries from persistently attended subspaces; and (iii) an entropy-derived temperature that adaptively reshapes the score distribution. Across four GUI benchmarks, STaR-KV achieves the strongest average accuracy among state-of-the-art KV compression methods (e.g., GUIKV, SnapKV) at matched budgets, with no compression-stage FLOPs overhead (-0.07%) and cutting peak GPU memory by nearly 40% at a 20% KV-cache budget. Code is available at https://github.com/kawhiiiileo/STaR-KV.
Domino: Decoupling Causal Modeling from Autoregressive Drafting in Speculative Decoding
May 28, 2026Speculative decoding accelerates LLM inference by drafting multiple tokens and verifying them in parallel with the target model. However, its practical speedup is constrained by the trade-off between draft quality and drafting cost: autoregressive drafters model causal dependencies among draft tokens but incur sequential overhead, while parallel drafters reduce drafting cost but weaken intra-block dependency modeling. In this paper, we propose Domino, a speculative decoding framework that decouples causal dependency modeling from expensive autoregressive draft execution. Domino first uses a parallel draft backbone to produce preliminary draft distributions for the entire block, and then applies a lightweight Domino head to refine them with prefix-dependent causal information. To stabilize teacher-forced causal encoding, we further introduce a base-anchored training curriculum that first strengthens the parallel backbone and then gradually shifts optimization toward the causally corrected final distribution. Experiments on Qwen3 models show that Domino achieves up to \(5.49\times\) end-to-end speedup under the Transformers backend and up to \(5.8\times\) throughput speedup under SGLang serving.
FlexDraft: Flexible Speculative Decoding via Attention Tuning and Bonus-Guided Calibration
May 19, 2026Speculative decoding accelerates memory-bound LLM inference without quality degradation by using a fast drafter to propose multiple candidate tokens and the target model to verify them in parallel. However, conventional sequential speculative decoding suffers from mutual waiting between drafting and verification, and repeated exchange of intermediate states further increases memory access overhead. Parallel speculative decoding addresses this limitation by performing drafting and verification within a single target forward pass, allowing future drafts to be prepared while current candidates are being verified. Although effective at small batch sizes, existing parallel speculative decoding methods either require costly continual pretraining with quality degradation or suffer from low acceptance rates. More importantly, this paradigm inherently suffers from uncertainty in both the bonus token and the accepted length, leading to draft verification mismatch and causing throughput gains to collapse at large batch sizes. To address these limitations, we introduce FlexDraft, a lossless speculative decoding framework that flexibly adapts to varying batch sizes through three key designs. (1) Attention Tuning enables block diffusion drafting by tuning only the attention projectors of the final few layers on mask tokens, while keeping the autoregressive path frozen to preserve the target distribution and produce high quality drafts with minimal trainable parameters. (2) Bonus-guided Calibration uses a lightweight MLP conditioned on the resolved bonus token to calibrate draft logits, mitigating draft verification mismatch caused by bonus token uncertainty. (3) Flex Decoding dynamically switches between parallel draft and verify at small batch sizes and sequential draft then verify at large batch sizes, and adjusts verification length based on draft confidence to eliminate redundant computation.
TimeChat-Captioner: Scripting Multi-Scene Videos with Time-Aware and Structural Audio-Visual Captions
Feb 09, 2026This paper proposes Omni Dense Captioning, a novel task designed to generate continuous, fine-grained, and structured audio-visual narratives with explicit timestamps. To ensure dense semantic coverage, we introduce a six-dimensional structural schema to create "script-like" captions, enabling readers to vividly imagine the video content scene by scene, akin to a cinematographic screenplay. To facilitate research, we construct OmniDCBench, a high-quality, human-annotated benchmark, and propose SodaM, a unified metric that evaluates time-aware detailed descriptions while mitigating scene boundary ambiguity. Furthermore, we construct a training dataset, TimeChatCap-42K, and present TimeChat-Captioner-7B, a strong baseline trained via SFT and GRPO with task-specific rewards. Extensive experiments demonstrate that TimeChat-Captioner-7B achieves state-of-the-art performance, surpassing Gemini-2.5-Pro, while its generated dense descriptions significantly boost downstream capabilities in audio-visual reasoning (DailyOmni and WorldSense) and temporal grounding (Charades-STA). All datasets, models, and code will be made publicly available at https://github.com/yaolinli/TimeChat-Captioner.
Innovator-VL: A Multimodal Large Language Model for Scientific Discovery
Jan 27, 2026We present Innovator-VL, a scientific multimodal large language model designed to advance understanding and reasoning across diverse scientific domains while maintaining excellent performance on general vision tasks. Contrary to the trend of relying on massive domain-specific pretraining and opaque pipelines, our work demonstrates that principled training design and transparent methodology can yield strong scientific intelligence with substantially reduced data requirements. (i) First, we provide a fully transparent, end-to-end reproducible training pipeline, covering data collection, cleaning, preprocessing, supervised fine-tuning, reinforcement learning, and evaluation, along with detailed optimization recipes. This facilitates systematic extension by the community. (ii) Second, Innovator-VL exhibits remarkable data efficiency, achieving competitive performance on various scientific tasks using fewer than five million curated samples without large-scale pretraining. These results highlight that effective reasoning can be achieved through principled data selection rather than indiscriminate scaling. (iii) Third, Innovator-VL demonstrates strong generalization, achieving competitive performance on general vision, multimodal reasoning, and scientific benchmarks. This indicates that scientific alignment can be integrated into a unified model without compromising general-purpose capabilities. Our practices suggest that efficient, reproducible, and high-performing scientific multimodal models can be built even without large-scale data, providing a practical foundation for future research.
Accelerating Diffusion Large Language Models with SlowFast: The Three Golden Principles
Jun 12, 2025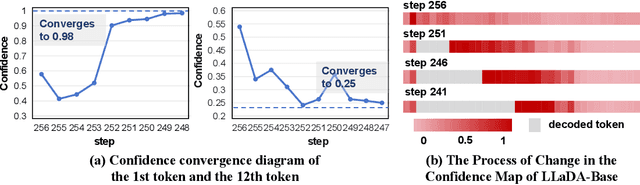
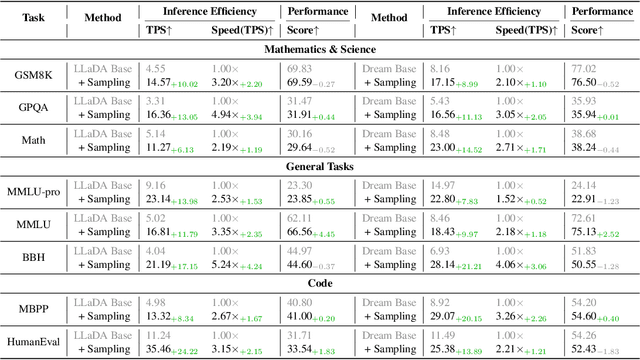
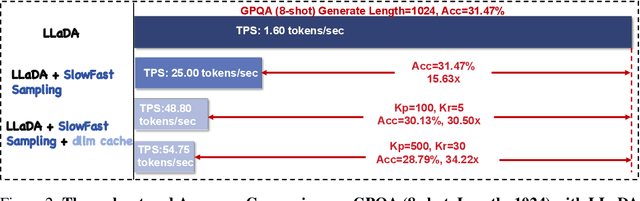
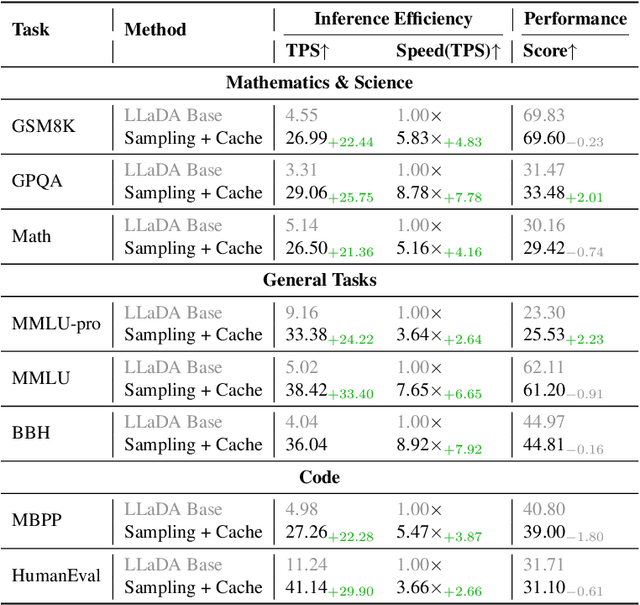
Diffusion-based language models (dLLMs) have emerged as a promising alternative to traditional autoregressive LLMs by enabling parallel token generation and significantly reducing inference latency. However, existing sampling strategies for dLLMs, such as confidence-based or semi-autoregressive decoding, often suffer from static behavior, leading to suboptimal efficiency and limited flexibility. In this paper, we propose SlowFast Sampling, a novel dynamic sampling strategy that adaptively alternates between exploratory and accelerated decoding stages. Our method is guided by three golden principles: certainty principle, convergence principle, and positional principle, which govern when and where tokens can be confidently and efficiently decoded. We further integrate our strategy with dLLM-Cache to reduce redundant computation. Extensive experiments across benchmarks and models show that SlowFast Sampling achieves up to 15.63$\times$ speedup on LLaDA with minimal accuracy drop, and up to 34.22$\times$ when combined with caching. Notably, our approach outperforms strong autoregressive baselines like LLaMA3 8B in throughput, demonstrating that well-designed sampling can unlock the full potential of dLLMs for fast and high-quality generation.
GS-Matching: Reconsidering Feature Matching task in Point Cloud Registration
Dec 06, 2024Traditional point cloud registration (PCR) methods for feature matching often employ the nearest neighbor policy. This leads to many-to-one matches and numerous potential inliers without any corresponding point. Recently, some approaches have framed the feature matching task as an assignment problem to achieve optimal one-to-one matches. We argue that the transition to the Assignment problem is not reliable for general correspondence-based PCR. In this paper, we propose a heuristics stable matching policy called GS-matching, inspired by the Gale-Shapley algorithm. Compared to the other matching policies, our method can perform efficiently and find more non-repetitive inliers under low overlapping conditions. Furthermore, we employ the probability theory to analyze the feature matching task, providing new insights into this research problem. Extensive experiments validate the effectiveness of our matching policy, achieving better registration recall on multiple datasets.
Sight View Constraint for Robust Point Cloud Registration
Sep 08, 2024



Partial to Partial Point Cloud Registration (partial PCR) remains a challenging task, particularly when dealing with a low overlap rate. In comparison to the full-to-full registration task, we find that the objective of partial PCR is still not well-defined, indicating no metric can reliably identify the true transformation. We identify this as the most fundamental challenge in partial PCR tasks. In this paper, instead of directly seeking the optimal transformation, we propose a novel and general Sight View Constraint (SVC) to conclusively identify incorrect transformations, thereby enhancing the robustness of existing PCR methods. Extensive experiments validate the effectiveness of SVC on both indoor and outdoor scenes. On the challenging 3DLoMatch dataset, our approach increases the registration recall from 78\% to 82\%, achieving the state-of-the-art result. This research also highlights the significance of the decision version problem of partial PCR, which has the potential to provide novel insights into the partial PCR problem.
Robust Multi-Robot Global Localization with Unknown Initial Pose based on Neighbor Constraints
Jun 27, 2024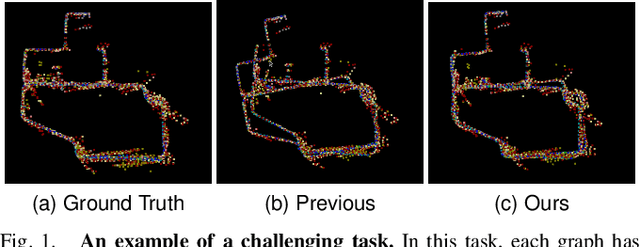
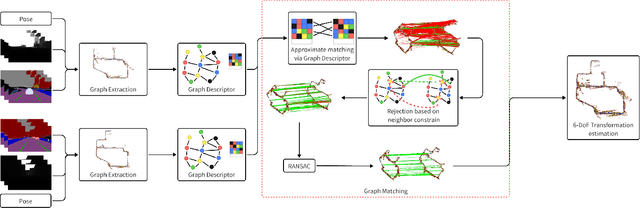
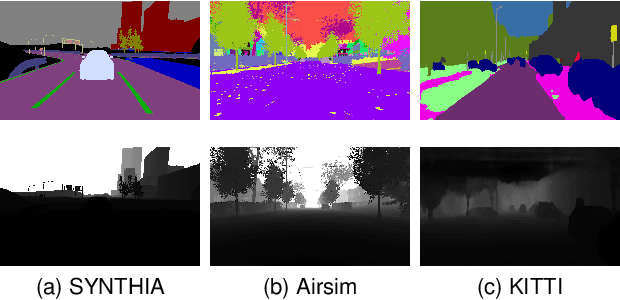
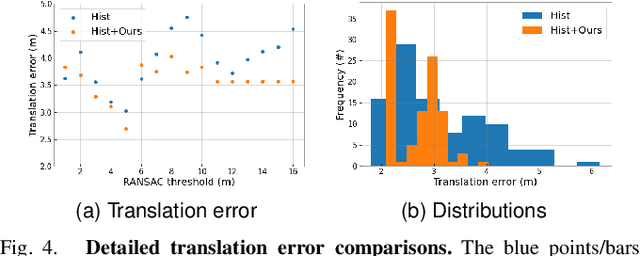
Multi-robot global localization (MR-GL) with unknown initial positions in a large scale environment is a challenging task. The key point is the data association between different robots' viewpoints. It also makes traditional Appearance-based localization methods unusable. Recently, researchers have utilized the object's semantic invariance to generate a semantic graph to address this issue. However, previous works lack robustness and are sensitive to overlap rate of maps, resulting in unpredictable performance in real-world environments. In this paper, we propose a data association algorithm based on neighbor constraints to improve the robustness of the system. We demonstrate the effectiveness of our method on three different datasets, indicating a significant improvement in robustness compared to previous works.