 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Multi-Robot Global Localization with Unknown Initial Pose based on Neighbor Constraints
Paper and Code
Jun 27, 2024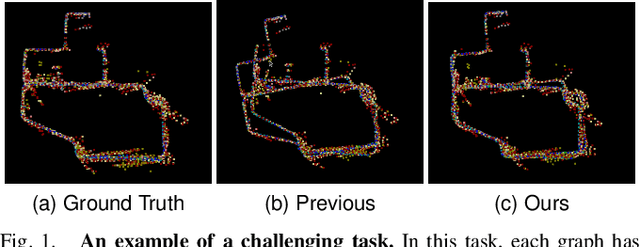
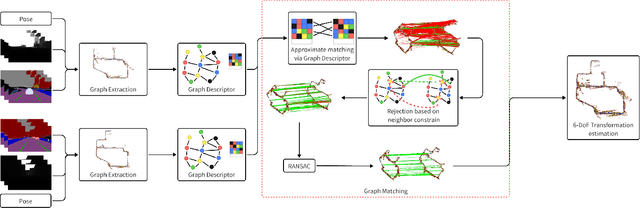
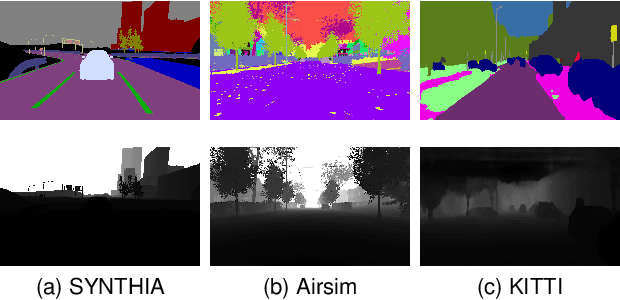
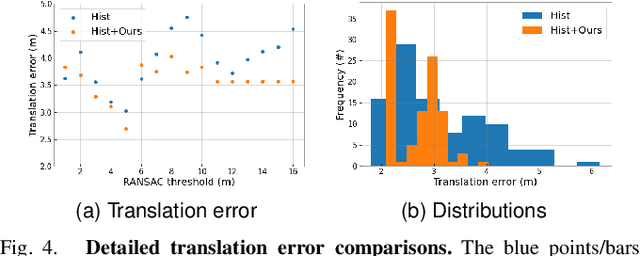
Multi-robot global localization (MR-GL) with unknown initial positions in a large scale environment is a challenging task. The key point is the data association between different robots' viewpoints. It also makes traditional Appearance-based localization methods unusable. Recently, researchers have utilized the object's semantic invariance to generate a semantic graph to address this issue. However, previous works lack robustness and are sensitive to overlap rate of maps, resulting in unpredictable performance in real-world environments. In this paper, we propose a data association algorithm based on neighbor constraints to improve the robustness of the system. We demonstrate the effectiveness of our method on three different datasets, indicating a significant improvement in robustness compared to previous works.