 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBPE: Behavioral Profiling Ensemble
Jan 15, 2026Ensemble learning is widely recognized as a pivotal strategy for pushing the boundaries of predictive performance. Traditional static ensemble methods, such as Stacking, typically assign weights by treating each base learner as a holistic entity, thereby overlooking the fact that individual models exhibit varying degrees of competence across different regions of the instance space. To address this limitation, Dynamic Ensemble Selection (DES) was introduced. However, both static and dynamic approaches predominantly rely on the divergence among different models as the basis for integration. This inter-model perspective neglects the intrinsic characteristics of the models themselves and necessitates a heavy reliance on validation sets for competence estimation. In this paper, we propose the Behavioral Profiling Ensemble (BPE) framework, which introduces a novel paradigm shift. Unlike traditional methods, BPE constructs a ``behavioral profile'' intrinsic to each model and derives integration weights based on the deviation between the model's response to a specific test instance and its established behavioral profile. Extensive experiments on both synthetic and real-world datasets demonstrate that the algorithm derived from the BPE framework achieves significant improvements over state-of-the-art ensemble baselines. These gains are evident not only in predictive accuracy but also in computational efficiency and storage resource utilization across various scenarios.
Accept-Reject Lasso
Aug 06, 2025The Lasso method is known to exhibit instability in the presence of highly correlated features, often leading to an arbitrary selection of predictors. This issue manifests itself in two primary error types: the erroneous omission of features that lack a true substitutable relationship (falsely redundant features) and the inclusion of features with a true substitutable relationship (truly redundant features). Although most existing methods address only one of these challenges, we introduce the Accept-Reject Lasso (ARL), a novel approach that resolves this dilemma. ARL operationalizes an Accept-Reject framework through a fine-grained analysis of feature selection across data subsets. This framework is designed to partition the output of an ensemble method into beneficial and detrimental components through fine-grained analysis. The fundamental challenge for Lasso is that inter-variable correlation obscures the true sources of information. ARL tackles this by first using clustering to identify distinct subset structures within the data. It then analyzes Lasso's behavior across these subsets to differentiate between true and spurious correlations. For truly correlated features, which induce multicollinearity, ARL tends to select a single representative feature and reject the rest to ensure model stability. Conversely, for features linked by spurious correlations, which may vanish in certain subsets, ARL accepts those that Lasso might have incorrectly omitted. The distinct patterns arising from true versus spurious correlations create a divisible separation. By setting an appropriate threshold, our framework can effectively distinguish between these two phenomena, thereby maximizing the inclusion of informative variables while minimizing the introduction of detrimental ones. We illustrate the efficacy of the proposed method through extensive simulation and real-data experiments.
Relative Overfitting and Accept-Reject Framework
May 12, 2025Currently, the scaling law of Large Language Models (LLMs) faces challenges and bottlenecks. This paper posits that noise effects, stemming from changes in the signal-to-noise ratio under diminishing marginal returns, are the root cause of these issues. To control this noise, we investigated the differences between models with performance advantages and disadvantages, introducing the concept of "relative overfitting." Based on their complementary strengths, we have proposed an application framework, Accept-Reject (AR). In Natural Language Processing (NLP), we use LLMs and Small Language Models (SLMs) as the medium for discussion. This framework enables SLMs to exert a universal positive influence on LLM decision outputs, rather than the intuitively expected negative influence. We validated our approach using self-built models based on mainstream architectures and pre-trained mainstream models across multiple datasets, including basic language modeling, long-context tasks, subject examination, and question-answering (QA) benchmarks. The results demonstrate that through our structure, compared to increasing the LLM's parameters, we can achieve better performance improvements with significantly lower parameter and computational costs in many scenarios. These improvements are universal, stable, and effective. Furthermore, we explore the potential of "relative overfitting" and the AR framework in other machine learning domains, such as computer vision (CV) and AI for science. We hope the proposed approach can help scale laws overcome existing bottlenecks.
Automated Evaluation of Large Vision-Language Models on Self-driving Corner Cases
Apr 16, 2024
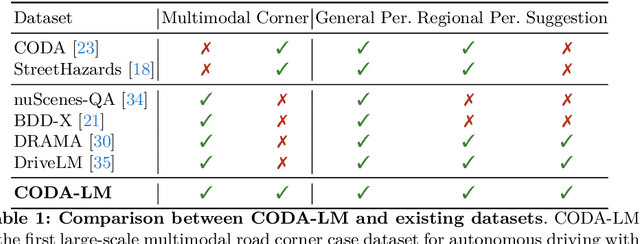


Large Vision-Language Models (LVLMs), due to the remarkable visual reasoning ability to understand images and videos, have received widespread attention in the autonomous driving domain, which significantly advances the development of interpretable end-to-end autonomous driving. However, current evaluations of LVLMs primarily focus on the multi-faceted capabilities in common scenarios, lacking quantifiable and automated assessment in autonomous driving contexts, let alone severe road corner cases that even the state-of-the-art autonomous driving perception systems struggle to handle. In this paper, we propose CODA-LM, a novel vision-language benchmark for self-driving, which provides the first automatic and quantitative evaluation of LVLMs for interpretable autonomous driving including general perception, regional perception, and driving suggestions. CODA-LM utilizes the texts to describe the road images, exploiting powerful text-only large language models (LLMs) without image inputs to assess the capabilities of LVLMs in autonomous driving scenarios, which reveals stronger alignment with human preferences than LVLM judges. Experiments demonstrate that even the closed-sourced commercial LVLMs like GPT-4V cannot deal with road corner cases well, suggesting that we are still far from a strong LVLM-powered intelligent driving agent, and we hope our CODA-LM can become the catalyst to promote future development.