 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMovePose: A High-performance Human Pose Estimation Algorithm on Mobile and Edge Devices
Aug 17, 2023



We present MovePose, an optimized lightweight convolutional neural network designed specifically for real-time body pose estimation on CPU-based mobile devices. The current solutions do not provide satisfactory accuracy and speed for human posture estimation, and MovePose addresses this gap. It aims to maintain real-time performance while improving the accuracy of human posture estimation for mobile devices. The network produces 17 keypoints for each individual at a rate exceeding 11 frames per second, making it suitable for real-time applications such as fitness tracking, sign language interpretation, and advanced mobile human posture estimation. Our MovePose algorithm has attained an Mean Average Precision (mAP) score of 67.7 on the COCO \cite{cocodata} validation dataset. The MovePose algorithm displayed efficiency with a performance of 69+ frames per second (fps) when run on an Intel i9-10920x CPU. Additionally, it showcased an increased performance of 452+ fps on an NVIDIA RTX3090 GPU. On an Android phone equipped with a Snapdragon 8 + 4G processor, the fps reached above 11. To enhance accuracy, we incorporated three techniques: deconvolution, large kernel convolution, and coordinate classification methods. Compared to basic upsampling, deconvolution is trainable, improves model capacity, and enhances the receptive field. Large kernel convolution strengthens these properties at a decreased computational cost. In summary, MovePose provides high accuracy and real-time performance, marking it a potential tool for a variety of applications, including those focused on mobile-side human posture estimation. The code and models for this algorithm will be made publicly accessible.
Asymmetric Dual-Decoder U-Net for Joint Rain and Haze Removal
Jun 21, 2022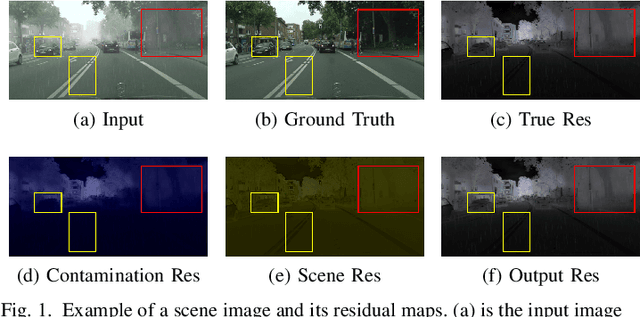

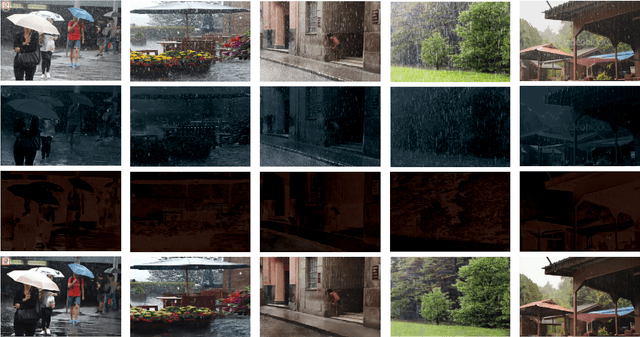
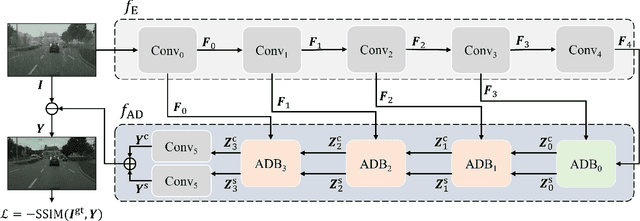
This work studies the joint rain and haze removal problem. In real-life scenarios, rain and haze, two often co-occurring common weather phenomena, can greatly degrade the clarity and quality of the scene images, leading to a performance drop in the visual applications, such as autonomous driving. However, jointly removing the rain and haze in scene images is ill-posed and challenging, where the existence of haze and rain and the change of atmosphere light, can both degrade the scene information. Current methods focus on the contamination removal part, thus ignoring the restoration of the scene information affected by the change of atmospheric light. We propose a novel deep neural network, named Asymmetric Dual-decoder U-Net (ADU-Net), to address the aforementioned challenge. The ADU-Net produces both the contamination residual and the scene residual to efficiently remove the rain and haze while preserving the fidelity of the scene information. Extensive experiments show our work outperforms the existing state-of-the-art methods by a considerable margin in both synthetic data and real-world data benchmarks, including RainCityscapes, BID Rain, and SPA-Data. For instance, we improve the state-of-the-art PSNR value by 2.26/4.57 on the RainCityscapes/SPA-Data, respectively. Codes will be made available freely to the research community.