 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFailure Detection for Motion Prediction of Autonomous Driving: An Uncertainty Perspective
Jan 11, 2023Motion prediction is essential for safe and efficient autonomous driving. However, the inexplicability and uncertainty of complex artificial intelligence models may lead to unpredictable failures of the motion prediction module, which may mislead the system to make unsafe decisions. Therefore, it is necessary to develop methods to guarantee reliable autonomous driving, where failure detection is a potential direction. Uncertainty estimates can be used to quantify the degree of confidence a model has in its predictions and may be valuable for failure detection. We propose a framework of failure detection for motion prediction from the uncertainty perspective, considering both motion uncertainty and model uncertainty, and formulate various uncertainty scores according to different prediction stages. The proposed approach is evaluated based on different motion prediction algorithms, uncertainty estimation methods, uncertainty scores, etc., and the results show that uncertainty is promising for failure detection for motion prediction but should be used with caution.
How Does Traffic Environment Quantitatively Affect the Autonomous Driving Prediction?
Jan 11, 2023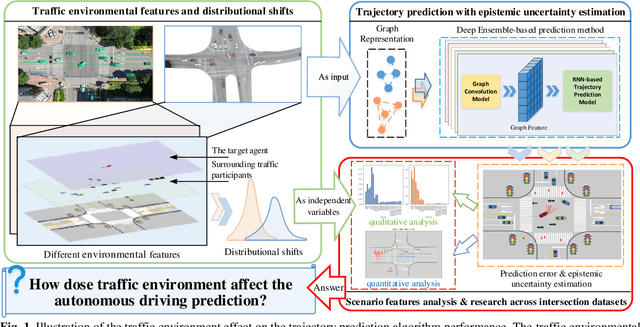

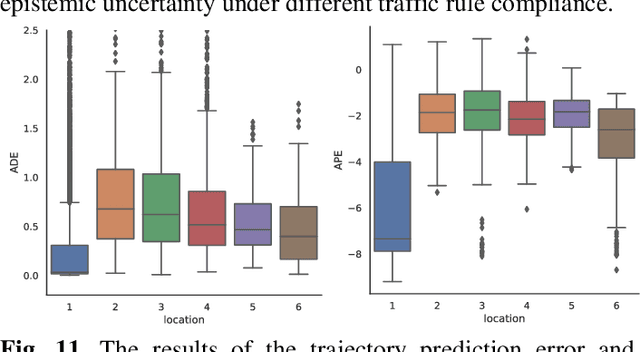

An accurate trajectory prediction is crucial for safe and efficient autonomous driving in complex traffic environments. In recent years, artificial intelligence has shown strong capabilities in improving prediction accuracy. However, its characteristics of inexplicability and uncertainty make it challenging to determine the traffic environmental effect on prediction explicitly, posing significant challenges to safety-critical decision-making. To address these challenges, this study proposes a trajectory prediction framework with the epistemic uncertainty estimation ability that outputs high uncertainty when confronting unforeseeable or unknown scenarios. The proposed framework is used to analyze the environmental effect on the prediction algorithm performance. In the analysis, the traffic environment is considered in terms of scenario features and shifts, respectively, where features are divided into kinematic features of a target agent, features of its surrounding traffic participants, and other features. In addition, feature correlation and importance analyses are performed to study the above features' influence on the prediction error and epistemic uncertainty. Further, a cross-dataset case study is conducted using multiple intersection datasets to investigate the impact of unavoidable distributional shifts in the real world on trajectory prediction. The results indicate that the deep ensemble-based method has advantages in improving prediction robustness and estimating epistemic uncertainty. The consistent conclusions are obtained by the feature correlation and importance analyses, including the conclusion that kinematic features of the target agent have relatively strong effects on the prediction error and epistemic uncertainty. Furthermore, the prediction failure caused by distributional shifts and the potential of the deep ensemble-based method are analyzed.
SIND: A Drone Dataset at Signalized Intersection in China
Sep 06, 2022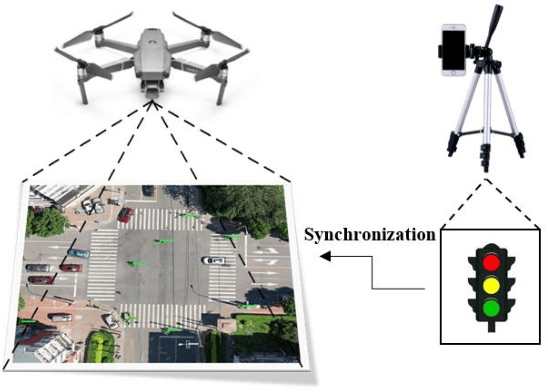
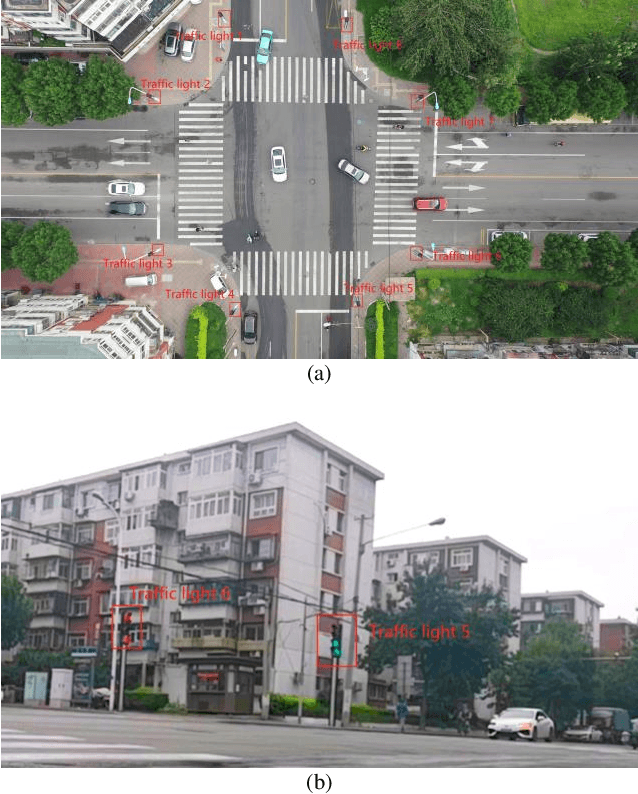
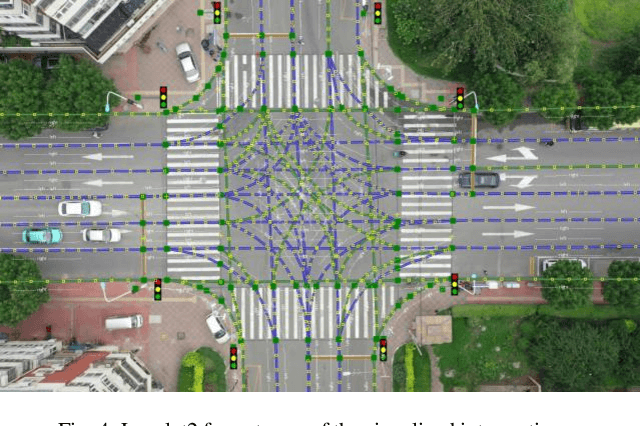
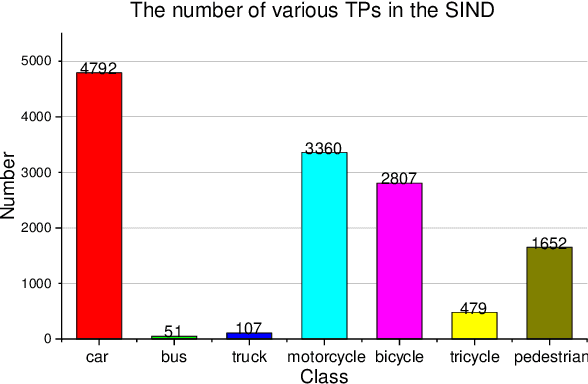
Intersection is one of the most challenging scenarios for autonomous driving tasks. Due to the complexity and stochasticity, essential applications (e.g., behavior modeling, motion prediction, safety validation, etc.) at intersections rely heavily on data-driven techniques. Thus, there is an intense demand for trajectory datasets of traffic participants (TPs) in intersections. Currently, most intersections in urban areas are equipped with traffic lights. However, there is not yet a large-scale, high-quality, publicly available trajectory dataset for signalized intersections. Therefore, in this paper, a typical two-phase signalized intersection is selected in Tianjin, China. Besides, a pipeline is designed to construct a Signalized INtersection Dataset (SIND), which contains 7 hours of recording including over 13,000 TPs with 7 types. Then, the behaviors of traffic light violations in SIND are recorded. Furthermore, the SIND is also compared with other similar works. The features of the SIND can be summarized as follows: 1) SIND provides more comprehensive information, including traffic light states, motion parameters, High Definition (HD) map, etc. 2) The category of TPs is diverse and characteristic, where the proportion of vulnerable road users (VRUs) is up to 62.6% 3) Multiple traffic light violations of non-motor vehicles are shown. We believe that SIND would be an effective supplement to existing datasets and can promote related research on autonomous driving.The dataset is available online via: https://github.com/SOTIF-AVLab/SinD