 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Does Traffic Environment Quantitatively Affect the Autonomous Driving Prediction?
Paper and Code
Jan 11, 2023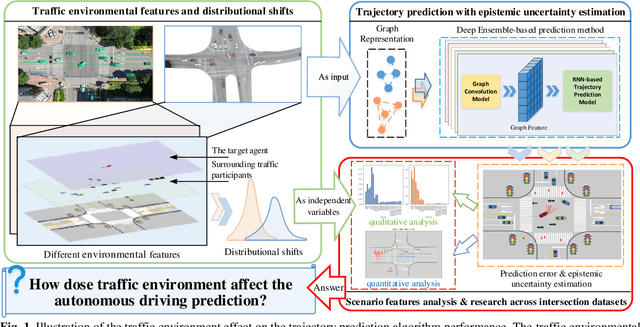

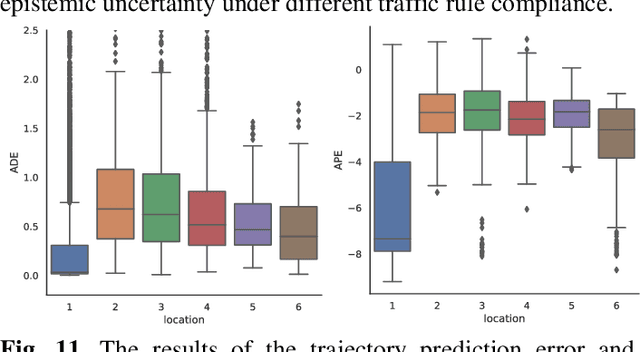

An accurate trajectory prediction is crucial for safe and efficient autonomous driving in complex traffic environments. In recent years, artificial intelligence has shown strong capabilities in improving prediction accuracy. However, its characteristics of inexplicability and uncertainty make it challenging to determine the traffic environmental effect on prediction explicitly, posing significant challenges to safety-critical decision-making. To address these challenges, this study proposes a trajectory prediction framework with the epistemic uncertainty estimation ability that outputs high uncertainty when confronting unforeseeable or unknown scenarios. The proposed framework is used to analyze the environmental effect on the prediction algorithm performance. In the analysis, the traffic environment is considered in terms of scenario features and shifts, respectively, where features are divided into kinematic features of a target agent, features of its surrounding traffic participants, and other features. In addition, feature correlation and importance analyses are performed to study the above features' influence on the prediction error and epistemic uncertainty. Further, a cross-dataset case study is conducted using multiple intersection datasets to investigate the impact of unavoidable distributional shifts in the real world on trajectory prediction. The results indicate that the deep ensemble-based method has advantages in improving prediction robustness and estimating epistemic uncertainty. The consistent conclusions are obtained by the feature correlation and importance analyses, including the conclusion that kinematic features of the target agent have relatively strong effects on the prediction error and epistemic uncertainty. Furthermore, the prediction failure caused by distributional shifts and the potential of the deep ensemble-based method are analyzed.