 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultistatic Integrated Sensing and Communication System in Cellular Networks
May 22, 2023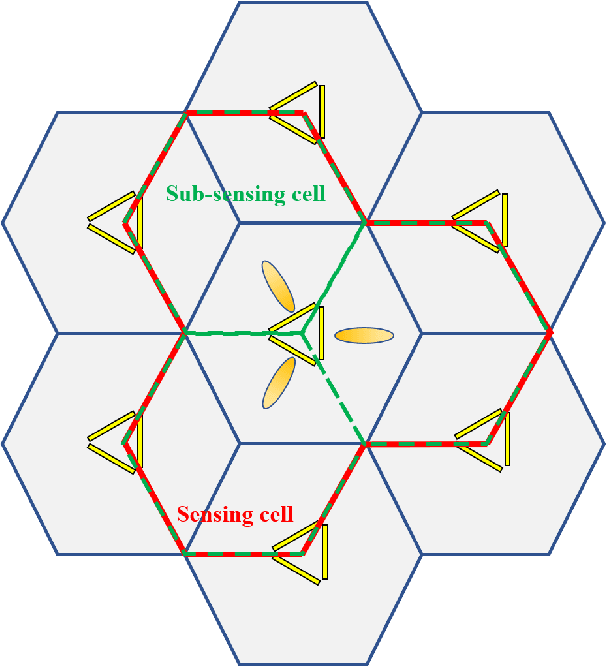
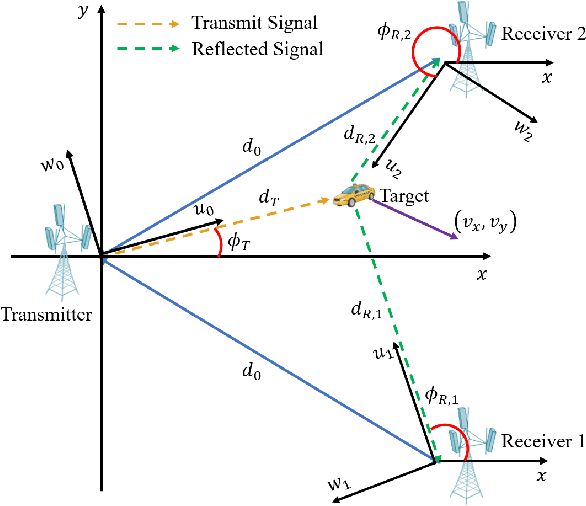
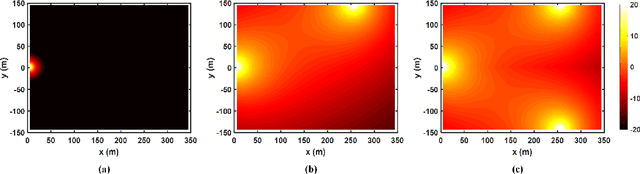
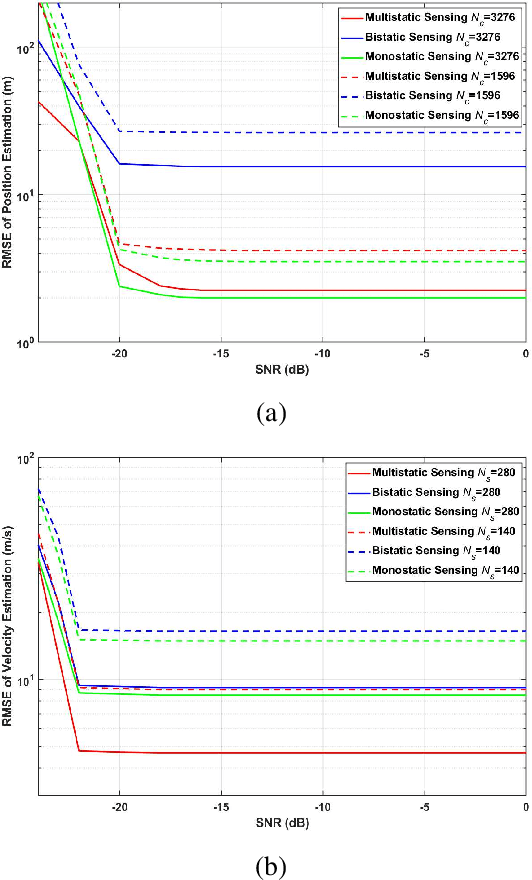
A novel multistatic multiple-input multiple-output (MIMO) integrated sensing and communication (ISAC) system in cellular networks is proposed. It can make use of widespread base stations (BSs) to perform cooperative sensing in wide area. This system is important since the deployment of sensing function can be achieved based on the existing mobile communication networks at a low cost. In this system, orthogonal frequency division multiplexing (OFDM) signals transmitted from the central BS are received and processed by each of the neighboring BSs to estimate sensing object parameters. A joint data processing method is then introduced to derive the closed-form solution of objects position and velocity. Numerical simulation shows that the proposed multistatic system can improve the position and velocity estimation accuracy compared with monostatic and bistatic system, demonstrating the effectiveness and promise of implementing ISAC in the upcoming fifth generation advanced (5G-A) and sixth generation (6G) mobile networks.
5G PRS-Based Sensing: A Sensing Reference Signal Approach for Joint Sensing and Communication System
Nov 21, 2022The emerging joint sensing and communication (JSC) technology is expected to support new applications and services, such as autonomous driving and extended reality (XR), in the future wireless communication systems. Pilot (or reference) signals in wireless communications usually have good passive detection performance, strong anti-noise capability and good auto-correlation characteristics, hence they bear the potential for applying in radar sensing. In this paper, we investigate how to apply the positioning reference signal (PRS) of the 5th generation (5G) mobile communications in radar sensing. This approach has the unique benefit of compatibility with the most advanced mobile communication system available so far. Thus, the PRS can be regarded as a sensing reference signal to simultaneously realize the functions of radar sensing, communication and positioning in a convenient manner. Firstly, we propose a PRS based radar sensing scheme and analyze its range and velocity estimation performance, based on which we propose a method that improves the accuracy of velocity estimation by using multiple frames. Furthermore, the Cramer-Rao lower bound (CRLB) of the range and velocity estimation for PRS based radar sensing and the CRLB of the range estimation for PRS based positioning are derived. Our analysis and simulation results demonstrate the feasibility and superiority of PRS over other pilot signals in radar sensing. Finally, some suggestions for the future 5G-Advanced and 6th generation (6G) frame structure design containing the sensing reference signal are derived based on our study.