 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpeeding Up Path Planning via Reinforcement Learning in MCTS for Automated Parking
Mar 25, 2024



In this paper, we address a method that integrates reinforcement learning into the Monte Carlo tree search to boost online path planning under fully observable environments for automated parking tasks. Sampling-based planning methods under high-dimensional space can be computationally expensive and time-consuming. State evaluation methods are useful by leveraging the prior knowledge into the search steps, making the process faster in a real-time system. Given the fact that automated parking tasks are often executed under complex environments, a solid but lightweight heuristic guidance is challenging to compose in a traditional analytical way. To overcome this limitation, we propose a reinforcement learning pipeline with a Monte Carlo tree search under the path planning framework. By iteratively learning the value of a state and the best action among samples from its previous cycle's outcomes, we are able to model a value estimator and a policy generator for given states. By doing that, we build up a balancing mechanism between exploration and exploitation, speeding up the path planning process while maintaining its quality without using human expert driver data.
Multistatic Integrated Sensing and Communication System in Cellular Networks
May 22, 2023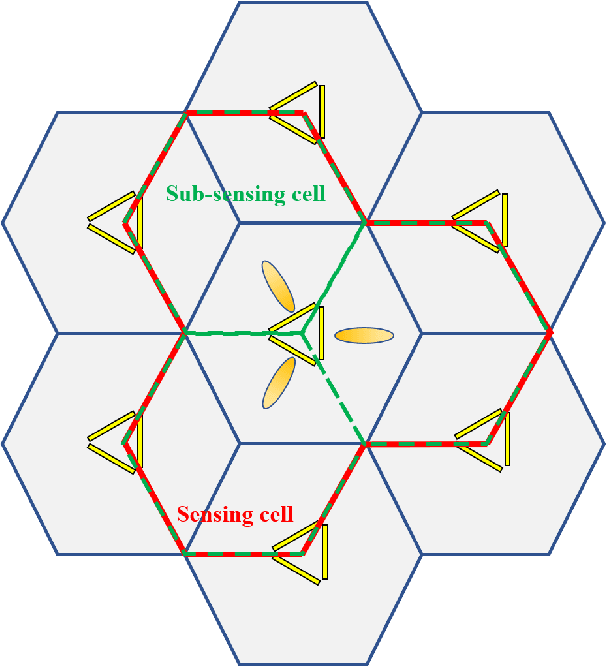
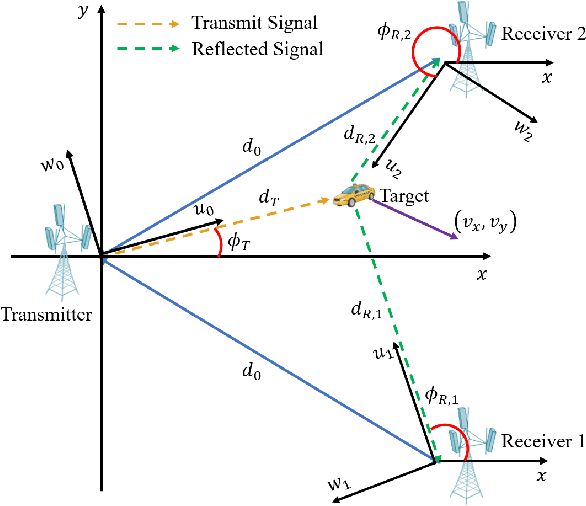
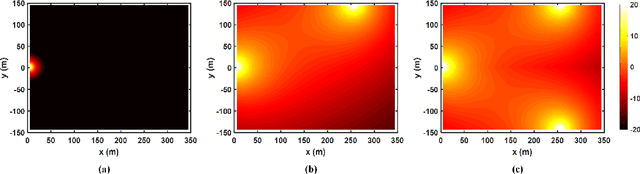
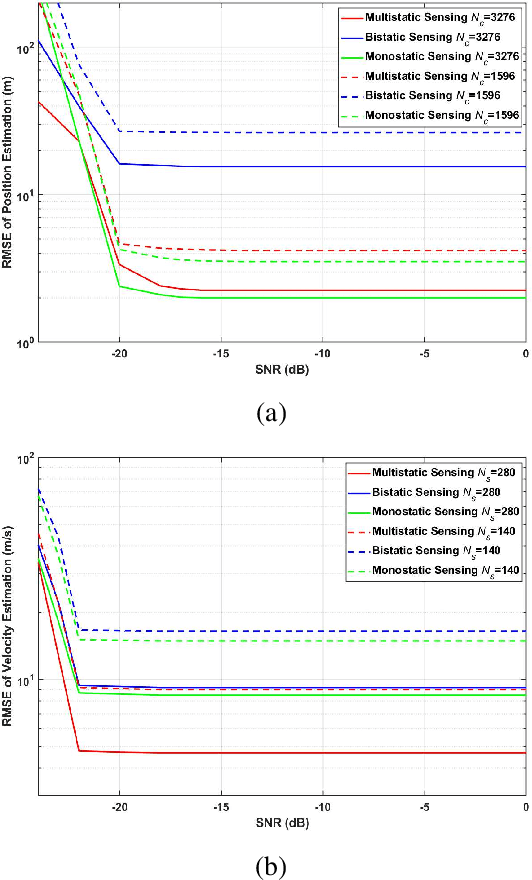
A novel multistatic multiple-input multiple-output (MIMO) integrated sensing and communication (ISAC) system in cellular networks is proposed. It can make use of widespread base stations (BSs) to perform cooperative sensing in wide area. This system is important since the deployment of sensing function can be achieved based on the existing mobile communication networks at a low cost. In this system, orthogonal frequency division multiplexing (OFDM) signals transmitted from the central BS are received and processed by each of the neighboring BSs to estimate sensing object parameters. A joint data processing method is then introduced to derive the closed-form solution of objects position and velocity. Numerical simulation shows that the proposed multistatic system can improve the position and velocity estimation accuracy compared with monostatic and bistatic system, demonstrating the effectiveness and promise of implementing ISAC in the upcoming fifth generation advanced (5G-A) and sixth generation (6G) mobile networks.