 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSlum Detection and Density Mapping with AlphaEarth Foundations: A Representation Learning Evaluation Across 12 Global Cities
May 11, 2026Pixel-level slum mapping has long been constrained by limited cross-city generalisation, the absence of continuous density estimation, and weak global comparability. AlphaEarth Foundations (AEF), a globally consistent 64-dimensional annual surface embedding at 10 m, offers a new analysis-ready basis for lightweight slum monitoring, but its applicability to slum detection - an indirectly coupled task shaped by both built form and socio-economic processes - remains untested. We evaluate AEF on slum classification and sub-pixel density estimation across 12 cities and 69 city-year pairs (2017-2024), using GRAM pseudo-masks as supervisory labels. The evaluation spans four training strategies, two protocols (random split and 3x3 spatial block cross-validation), six auxiliary feature configurations, and five baseline models, complemented by representation-level analyses (PCA, SHAP) and full-AOI mapping. Five findings emerge. (1) Same-city cross-year training is optimal under both protocols (median spatial F1 = 0.616, R^2 = 0.466); temporal expansion outperforms cross-city transfer, indicating city-scale representational drift. (2) Regression R^2 is driven primarily by zero/non-zero boundary discrimination: positive-pixel R^2 is consistently negative across all cities, revealing limited capacity to model intra-pixel density gradients at 10 m. (3) PC36 is consistently top-ranked across tasks; classification saturates at k = 32 while regression remains unsaturated at k = 64. (4) POI features yield the largest density gain (Delta R^2 = +0.064). (5) For six cities meeting dual-task usability thresholds, full-AOI inference across 2017-2024 preserves slum cluster structure (mean SSIM = 0.926). The study delineates the capabilities and complementarity needs of foundation-model embeddings for slum monitoring.
AutoGEEval: A Multimodal and Automated Framework for Geospatial Code Generation on GEE with Large Language Models
May 19, 2025Geospatial code generation is emerging as a key direction in the integration of artificial intelligence and geoscientific analysis. However, there remains a lack of standardized tools for automatic evaluation in this domain. To address this gap, we propose AutoGEEval, the first multimodal, unit-level automated evaluation framework for geospatial code generation tasks on the Google Earth Engine (GEE) platform powered by large language models (LLMs). Built upon the GEE Python API, AutoGEEval establishes a benchmark suite (AutoGEEval-Bench) comprising 1325 test cases that span 26 GEE data types. The framework integrates both question generation and answer verification components to enable an end-to-end automated evaluation pipeline-from function invocation to execution validation. AutoGEEval supports multidimensional quantitative analysis of model outputs in terms of accuracy, resource consumption, execution efficiency, and error types. We evaluate 18 state-of-the-art LLMs-including general-purpose, reasoning-augmented, code-centric, and geoscience-specialized models-revealing their performance characteristics and potential optimization pathways in GEE code generation. This work provides a unified protocol and foundational resource for the development and assessment of geospatial code generation models, advancing the frontier of automated natural language to domain-specific code translation.
GeoCode-GPT: A Large Language Model for Geospatial Code Generation Tasks
Oct 23, 2024



The increasing demand for spatiotemporal data and modeling tasks in geosciences has made geospatial code generation technology a critical factor in enhancing productivity. Although large language models (LLMs) have demonstrated potential in code generation tasks, they often encounter issues such as refusal to code or hallucination in geospatial code generation due to a lack of domain-specific knowledge and code corpora. To address these challenges, this paper presents and open-sources the GeoCode-PT and GeoCode-SFT corpora, along with the GeoCode-Eval evaluation dataset. Additionally, by leveraging QLoRA and LoRA for pretraining and fine-tuning, we introduce GeoCode-GPT-7B, the first LLM focused on geospatial code generation, fine-tuned from Code Llama-7B. Furthermore, we establish a comprehensive geospatial code evaluation framework, incorporating option matching, expert validation, and prompt engineering scoring for LLMs, and systematically evaluate GeoCode-GPT-7B using the GeoCode-Eval dataset. Experimental results show that GeoCode-GPT outperforms other models in multiple-choice accuracy by 9.1% to 32.1%, in code summarization ability by 1.7% to 25.4%, and in code generation capability by 1.2% to 25.1%. This paper provides a solution and empirical validation for enhancing LLMs' performance in geospatial code generation, extends the boundaries of domain-specific model applications, and offers valuable insights into unlocking their potential in geospatial code generation.
Forecast Network-Wide Traffic States for Multiple Steps Ahead: A Deep Learning Approach Considering Dynamic Non-Local Spatial Correlation and Non-Stationary Temporal Dependency
Apr 06, 2020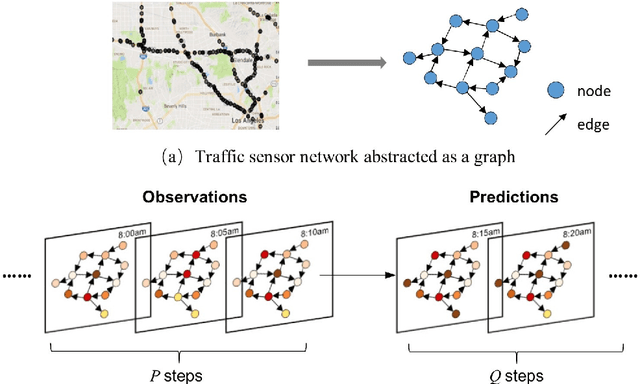

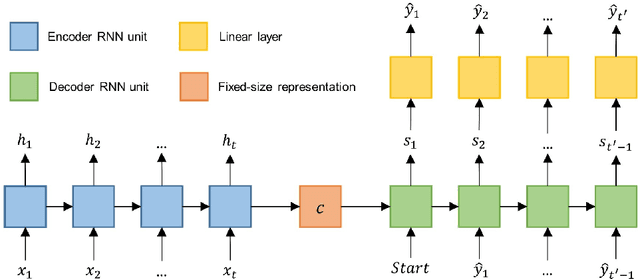
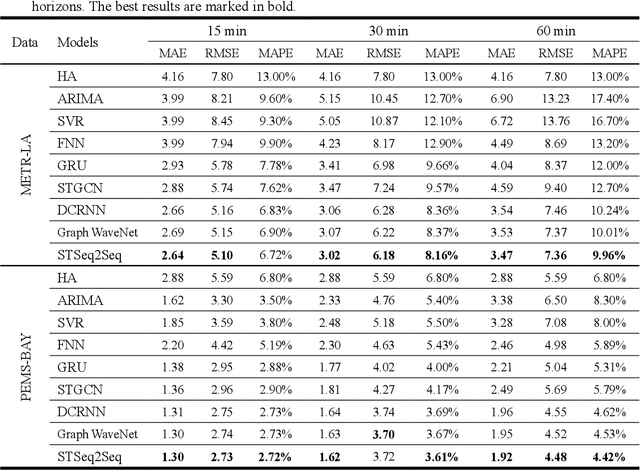
Obtaining accurate information about future traffic flows of all links in a traffic network is of great importance for traffic management and control applications. This research studies two particular problems in traffic forecasting: (1) capture the dynamic and non-local spatial correlation between traffic links and (2) model the dynamics of temporal dependency for accurate multiple steps ahead predictions. To address these issues, we propose a deep learning framework named Spatial-Temporal Sequence to Sequence model (STSeq2Seq). This model builds on sequence to sequence (seq2seq) architecture to capture temporal feature and relies on graph convolution for aggregating spatial information. Moreover, STSeq2Seq defines and constructs pattern-aware adjacency matrices (PAMs) based on pair-wise similarity of the recent traffic patterns on traffic links and integrate it into graph convolution operation. It also deploys a novel seq2sesq architecture which couples a convolutional encoder and a recurrent decoder with attention mechanism for dynamic modeling of long-range dependence between different time steps. We conduct extensive experiments using two publicly-available large-scale traffic datasets and compare STSeq2Seq with other baseline models. The numerical results demonstrate that the proposed model achieves state-of-the-art forecasting performance in terms of various error measures. The ablation study verifies the effectiveness of PAMs in capturing dynamic non-local spatial correlation and the superiority of proposed seq2seq architecture in modeling non-stationary temporal dependency for multiple steps ahead prediction. Furthermore, qualitative analysis is conducted on PAMs as well as the attention weights for model interpretation.
A Hybrid Traffic Speed Forecasting Approach Integrating Wavelet Transform and Motif-based Graph Convolutional Recurrent Neural Network
Apr 14, 2019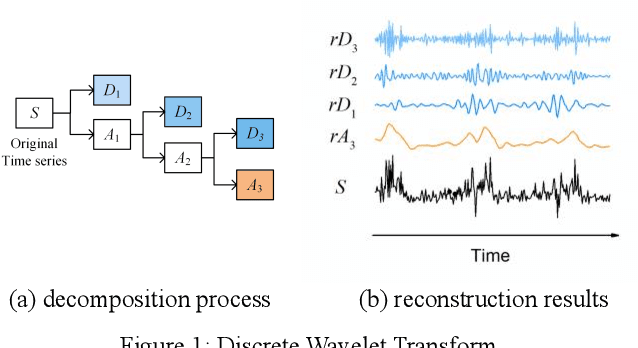
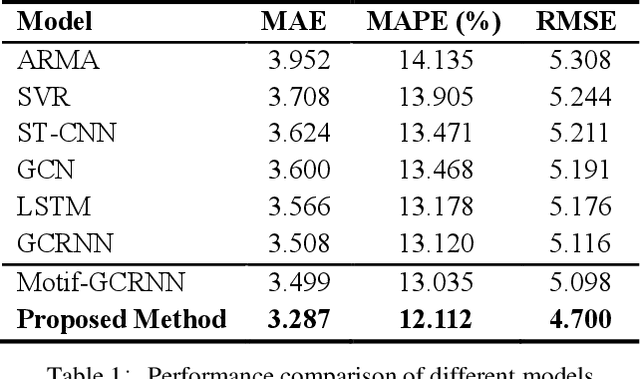
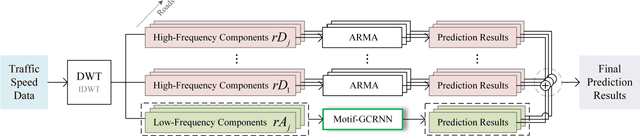
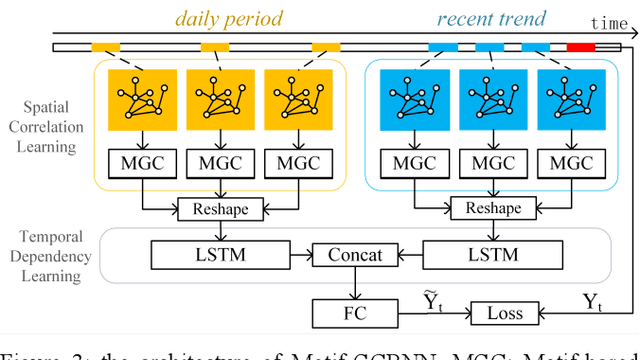
Traffic forecasting is crucial for urban traffic management and guidance. However, existing methods rarely exploit the time-frequency properties of traffic speed observations, and often neglect the propagation of traffic flows from upstream to downstream road segments. In this paper, we propose a hybrid approach that learns the spatio-temporal dependency in traffic flows and predicts short-term traffic speeds on a road network. Specifically, we employ wavelet transform to decompose raw traffic data into several components with different frequency sub-bands. A Motif-based Graph Convolutional Recurrent Neural Network (Motif-GCRNN) and Auto-Regressive Moving Average (ARMA) are used to train and predict low-frequency components and high-frequency components, respectively. In the Motif-GCRNN framework, we integrate Graph Convolutional Networks (GCNs) with local sub-graph structures - Motifs - to capture the spatial correlations among road segments, and apply Long Short-Term Memory (LSTM) to extract the short-term and periodic patterns in traffic speeds. Experiments on a traffic dataset collected in Chengdu, China, demonstrate that the proposed hybrid method outperforms six state-of-art prediction methods.