 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClusterFusion: Real-time Relative Positioning and Dense Reconstruction for UAV Cluster
Apr 11, 2023As robotics technology advances, dense point cloud maps are increasingly in demand. However, dense reconstruction using a single unmanned aerial vehicle (UAV) suffers from limitations in flight speed and battery power, resulting in slow reconstruction and low coverage. Cluster UAV systems offer greater flexibility and wider coverage for map building. Existing methods of cluster UAVs face challenges with accurate relative positioning, scale drift, and high-speed dense point cloud map generation. To address these issues, we propose a cluster framework for large-scale dense reconstruction and real-time collaborative localization. The front-end of the framework is an improved visual odometry which can effectively handle large-scale scenes. Collaborative localization between UAVs is enabled through a two-stage joint optimization algorithm and a relative pose optimization algorithm, effectively achieving accurate relative positioning of UAVs and mitigating scale drift. Estimated poses are used to achieve real-time dense reconstruction and fusion of point cloud maps. To evaluate the performance of our proposed method, we conduct qualitative and quantitative experiments on real-world data. The results demonstrate that our framework can effectively suppress scale drift and generate large-scale dense point cloud maps in real-time, with the reconstruction speed increasing as more UAVs are added to the system.
HybridFusion: LiDAR and Vision Cross-Source Point Cloud Fusion
Apr 10, 2023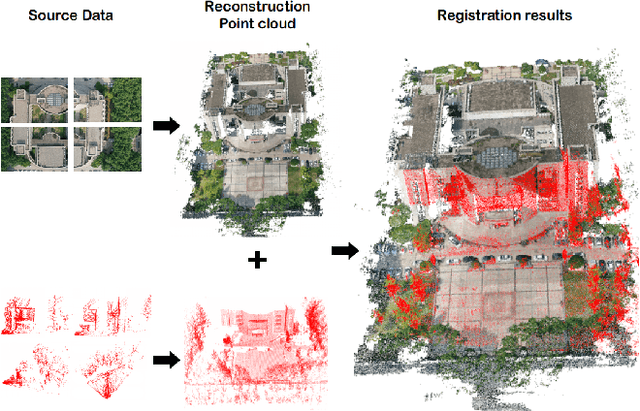
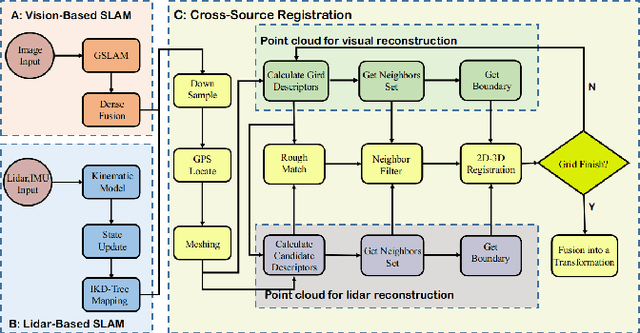
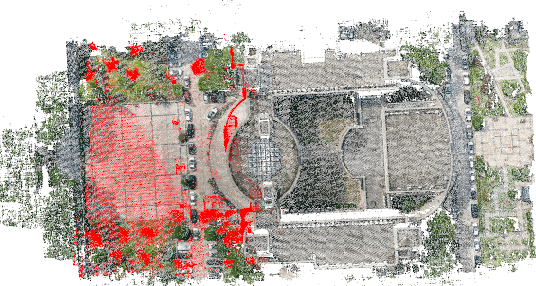
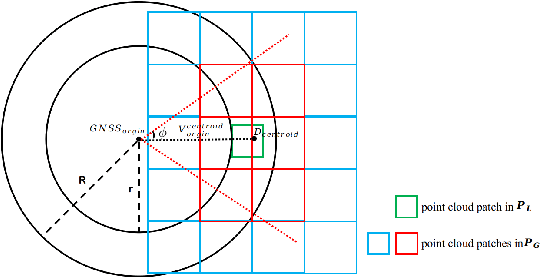
Recently, cross-source point cloud registration from different sensors has become a significant research focus. However, traditional methods confront challenges due to the varying density and structure of cross-source point clouds. In order to solve these problems, we propose a cross-source point cloud fusion algorithm called HybridFusion. It can register cross-source dense point clouds from different viewing angle in outdoor large scenes. The entire registration process is a coarse-to-fine procedure. First, the point cloud is divided into small patches, and a matching patch set is selected based on global descriptors and spatial distribution, which constitutes the coarse matching process. To achieve fine matching, 2D registration is performed by extracting 2D boundary points from patches, followed by 3D adjustment. Finally, the results of multiple patch pose estimates are clustered and fused to determine the final pose. The proposed approach is evaluated comprehensively through qualitative and quantitative experiments. In order to compare the robustness of cross-source point cloud registration, the proposed method and generalized iterative closest point method are compared. Furthermore, a metric for describing the degree of point cloud filling is proposed. The experimental results demonstrate that our approach achieves state-of-the-art performance in cross-source point cloud registration.
Attention Aware Cost Volume Pyramid Based Multi-view Stereo Network for 3D Reconstruction
Nov 25, 2020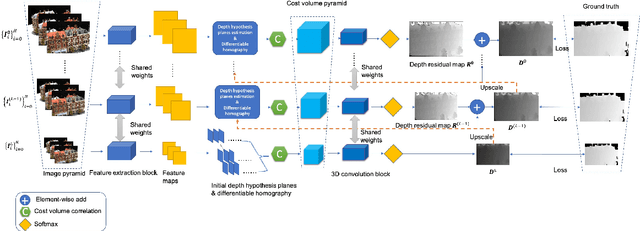
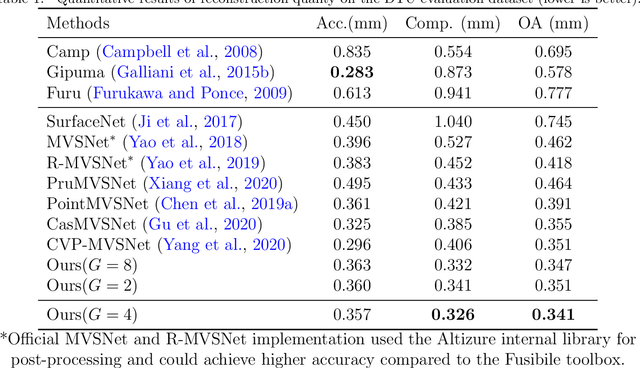
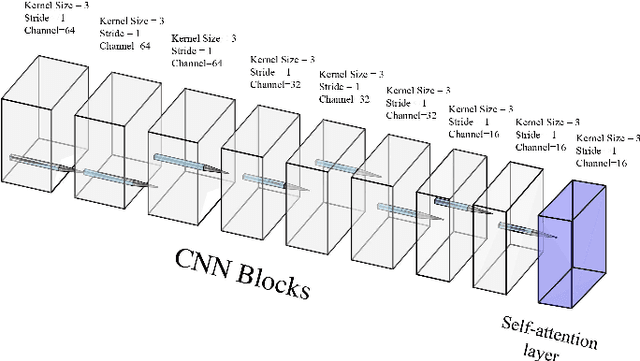

We present an efficient multi-view stereo (MVS) network for 3D reconstruction from multiview images. While previous learning based reconstruction approaches performed quite well, most of them estimate depth maps at a fixed resolution using plane sweep volumes with a fixed depth hypothesis at each plane, which requires densely sampled planes for desired accuracy and therefore is difficult to achieve high resolution depth maps. In this paper we introduce a coarseto-fine depth inference strategy to achieve high resolution depth. This strategy estimates the depth map at coarsest level, while the depth maps at finer levels are considered as the upsampled depth map from previous level with pixel-wise depth residual. Thus, we narrow the depth searching range with priori information from previous level and construct new cost volumes from the pixel-wise depth residual to perform depth map refinement. Then the final depth map could be achieved iteratively since all the parameters are shared between different levels. At each level, the self-attention layer is introduced to the feature extraction block for capturing the long range dependencies for depth inference task, and the cost volume is generated using similarity measurement instead of the variance based methods used in previous work. Experiments were conducted on both the DTU benchmark dataset and recently released BlendedMVS dataset. The results demonstrated that our model could outperform most state-of-the-arts (SOTA) methods. The codebase of this project is at https://github.com/ArthasMil/AACVP-MVSNet.