 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCurriculumLoc: Enhancing Cross-Domain Geolocalization through Multi-Stage Refinement
Nov 20, 2023



Visual geolocalization is a cost-effective and scalable task that involves matching one or more query images, taken at some unknown location, to a set of geo-tagged reference images. Existing methods, devoted to semantic features representation, evolving towards robustness to a wide variety between query and reference, including illumination and viewpoint changes, as well as scale and seasonal variations. However, practical visual geolocalization approaches need to be robust in appearance changing and extreme viewpoint variation conditions, while providing accurate global location estimates. Therefore, inspired by curriculum design, human learn general knowledge first and then delve into professional expertise. We first recognize semantic scene and then measure geometric structure. Our approach, termed CurriculumLoc, involves a delicate design of multi-stage refinement pipeline and a novel keypoint detection and description with global semantic awareness and local geometric verification. We rerank candidates and solve a particular cross-domain perspective-n-point (PnP) problem based on these keypoints and corresponding descriptors, position refinement occurs incrementally. The extensive experimental results on our collected dataset, TerraTrack and a benchmark dataset, ALTO, demonstrate that our approach results in the aforementioned desirable characteristics of a practical visual geolocalization solution. Additionally, we achieve new high recall@1 scores of 62.6% and 94.5% on ALTO, with two different distances metrics, respectively. Dataset, code and trained models are publicly available on https://github.com/npupilab/CurriculumLoc.
ClusterFusion: Real-time Relative Positioning and Dense Reconstruction for UAV Cluster
Apr 11, 2023As robotics technology advances, dense point cloud maps are increasingly in demand. However, dense reconstruction using a single unmanned aerial vehicle (UAV) suffers from limitations in flight speed and battery power, resulting in slow reconstruction and low coverage. Cluster UAV systems offer greater flexibility and wider coverage for map building. Existing methods of cluster UAVs face challenges with accurate relative positioning, scale drift, and high-speed dense point cloud map generation. To address these issues, we propose a cluster framework for large-scale dense reconstruction and real-time collaborative localization. The front-end of the framework is an improved visual odometry which can effectively handle large-scale scenes. Collaborative localization between UAVs is enabled through a two-stage joint optimization algorithm and a relative pose optimization algorithm, effectively achieving accurate relative positioning of UAVs and mitigating scale drift. Estimated poses are used to achieve real-time dense reconstruction and fusion of point cloud maps. To evaluate the performance of our proposed method, we conduct qualitative and quantitative experiments on real-world data. The results demonstrate that our framework can effectively suppress scale drift and generate large-scale dense point cloud maps in real-time, with the reconstruction speed increasing as more UAVs are added to the system.
HybridFusion: LiDAR and Vision Cross-Source Point Cloud Fusion
Apr 10, 2023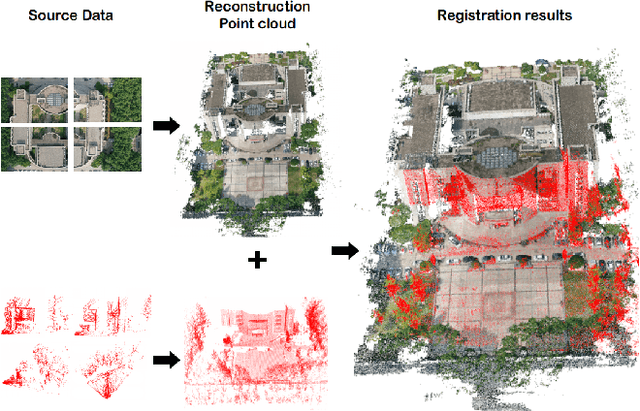
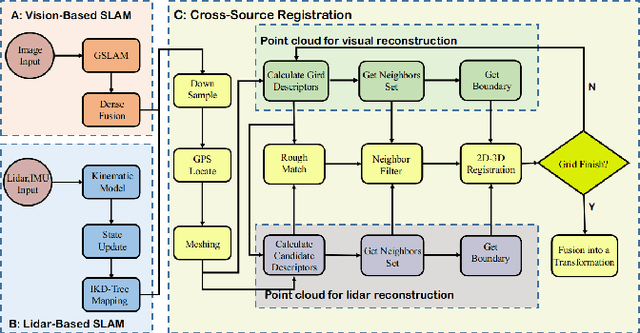
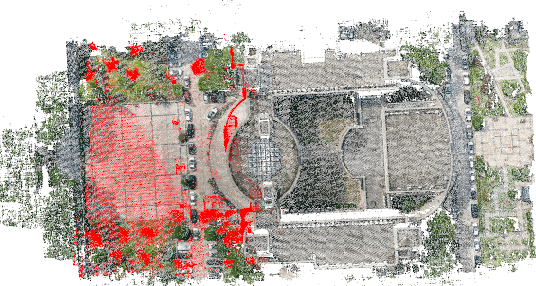
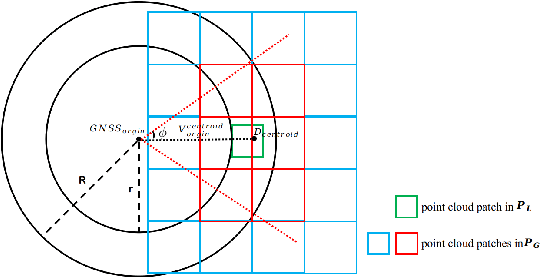
Recently, cross-source point cloud registration from different sensors has become a significant research focus. However, traditional methods confront challenges due to the varying density and structure of cross-source point clouds. In order to solve these problems, we propose a cross-source point cloud fusion algorithm called HybridFusion. It can register cross-source dense point clouds from different viewing angle in outdoor large scenes. The entire registration process is a coarse-to-fine procedure. First, the point cloud is divided into small patches, and a matching patch set is selected based on global descriptors and spatial distribution, which constitutes the coarse matching process. To achieve fine matching, 2D registration is performed by extracting 2D boundary points from patches, followed by 3D adjustment. Finally, the results of multiple patch pose estimates are clustered and fused to determine the final pose. The proposed approach is evaluated comprehensively through qualitative and quantitative experiments. In order to compare the robustness of cross-source point cloud registration, the proposed method and generalized iterative closest point method are compared. Furthermore, a metric for describing the degree of point cloud filling is proposed. The experimental results demonstrate that our approach achieves state-of-the-art performance in cross-source point cloud registration.
GSLAM: A General SLAM Framework and Benchmark
Feb 21, 2019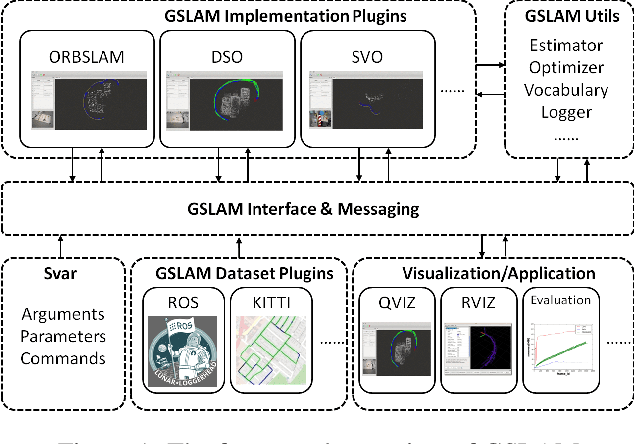
SLAM technology has recently seen many successes and attracted the attention of high-technological companies. However, how to unify the interface of existing or emerging algorithms, and effectively perform benchmark about the speed, robustness and portability are still problems. In this paper, we propose a novel SLAM platform named GSLAM, which not only provides evaluation functionality, but also supplies useful toolkit for researchers to quickly develop their own SLAM systems. The core contribution of GSLAM is an universal, cross-platform and full open-source SLAM interface for both research and commercial usage, which is aimed to handle interactions with input dataset, SLAM implementation, visualization and applications in an unified framework. Through this platform, users can implement their own functions for better performance with plugin form and further boost the application to practical usage of the SLAM.