 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning for Robot Assistance in Open Surgery: A Multi-Policy Evaluation on Suture Following
May 27, 2026This study presents the first evaluation of general-purpose imitation learning for surgeon-robot collaborative assistance in open surgery, targeting suture following: the grab-pull-release motion an assistant performs at every stitch. We collect 160 teleoperated demonstrations (32,374 frames) on an open-source robot arm, benchmark four architecturally diverse imitation learning policies (ACT, Diffusion Policy, SmolVLA, $π_0$) across 28 trained models evaluated in 32 configurations along three clinically motivated dimensions: dataset size, camera viewpoint, and background variation. Our results demonstrate that under ideal conditions, the four policies achieve $50$-$75\%$ task success, with depth error as the dominant failure mode across all architectures. Among all policies, $π_0$ achieves the strongest results with a pretrained vision-language backbone, demonstrating superior data efficiency, greater robustness to background variation, and smoother trajectories compatible with surgical workflow. When deployed in a surgeon-robot suturing trial, $π_0$ yields a $92\%$ stitch completion rate. These findings establish collaborative robotic assistance in open surgery as a feasible target for imitation learning and highlight depth perception and end-effector design as key priorities for clinical translation.
ReXSonoVQA: A Video QA Benchmark for Procedure-Centric Ultrasound Understanding
Apr 14, 2026Ultrasound acquisition requires skilled probe manipulation and real-time adjustments. Vision-language models (VLMs) could enable autonomous ultrasound systems, but existing benchmarks evaluate only static images, not dynamic procedural understanding. We introduce ReXSonoVQA, a video QA benchmark with 514 video clips and 514 questions (249 MCQ, 265 free-response) targeting three competencies: Action-Goal Reasoning, Artifact Resolution & Optimization, and Procedure Context & Planning. Zero-shot evaluation of Gemini 3 Pro, Qwen3.5-397B, LLaVA-Video-72B, and Seed 2.0 Pro shows VLMs can extract some procedural information, but troubleshooting questions remain challenging with minimal gains over text-only baselines, exposing limitations in causal reasoning. ReXSonoVQA enables developing perception systems for ultrasound training, guidance, and robotic automation.
A Unified Framework for Multimodal Image Reconstruction and Synthesis using Denoising Diffusion Models
Feb 09, 2026Image reconstruction and image synthesis are important for handling incomplete multimodal imaging data, but existing methods require various task-specific models, complicating training and deployment workflows. We introduce Any2all, a unified framework that addresses this limitation by formulating these disparate tasks as a single virtual inpainting problem. We train a single, unconditional diffusion model on the complete multimodal data stack. This model is then adapted at inference time to ``inpaint'' all target modalities from any combination of inputs of available clean images or noisy measurements. We validated Any2all on a PET/MR/CT brain dataset. Our results show that Any2all can achieve excellent performance on both multimodal reconstruction and synthesis tasks, consistently yielding images with competitive distortion-based performance and superior perceptual quality over specialized methods.
Learning Occlusion-Robust Vision Transformers for Real-Time UAV Tracking
Apr 12, 2025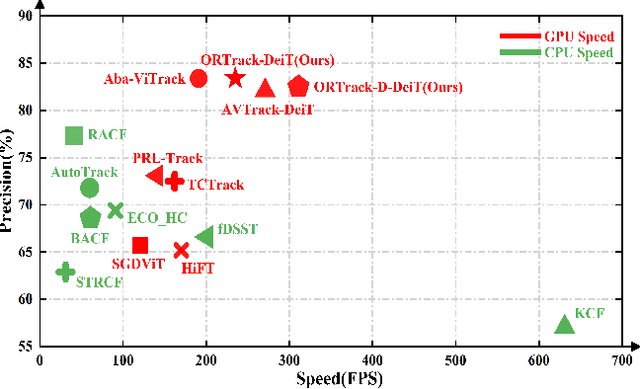
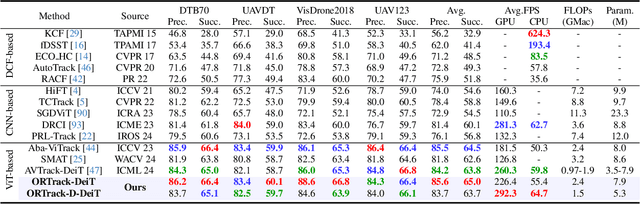
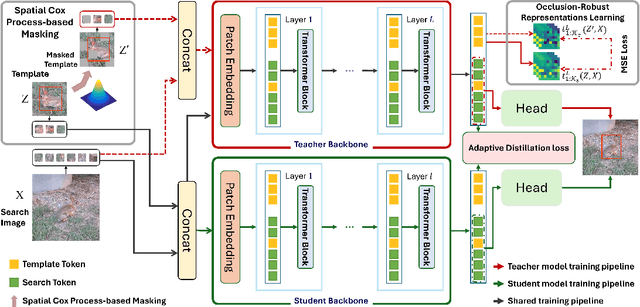

Single-stream architectures using Vision Transformer (ViT) backbones show great potential for real-time UAV tracking recently. However, frequent occlusions from obstacles like buildings and trees expose a major drawback: these models often lack strategies to handle occlusions effectively. New methods are needed to enhance the occlusion resilience of single-stream ViT models in aerial tracking. In this work, we propose to learn Occlusion-Robust Representations (ORR) based on ViTs for UAV tracking by enforcing an invariance of the feature representation of a target with respect to random masking operations modeled by a spatial Cox process. Hopefully, this random masking approximately simulates target occlusions, thereby enabling us to learn ViTs that are robust to target occlusion for UAV tracking. This framework is termed ORTrack. Additionally, to facilitate real-time applications, we propose an Adaptive Feature-Based Knowledge Distillation (AFKD) method to create a more compact tracker, which adaptively mimics the behavior of the teacher model ORTrack according to the task's difficulty. This student model, dubbed ORTrack-D, retains much of ORTrack's performance while offering higher efficiency. Extensive experiments on multiple benchmarks validate the effectiveness of our method, demonstrating its state-of-the-art performance. Codes is available at https://github.com/wuyou3474/ORTrack.
Learning Adaptive and View-Invariant Vision Transformer with Multi-Teacher Knowledge Distillation for Real-Time UAV Tracking
Dec 28, 2024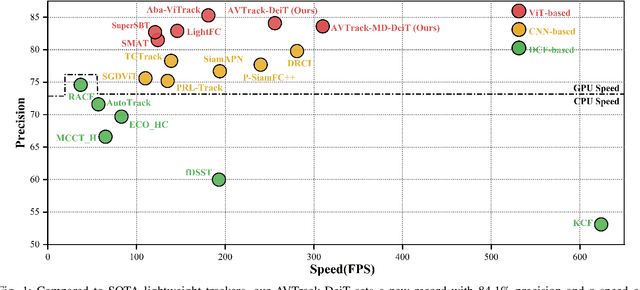
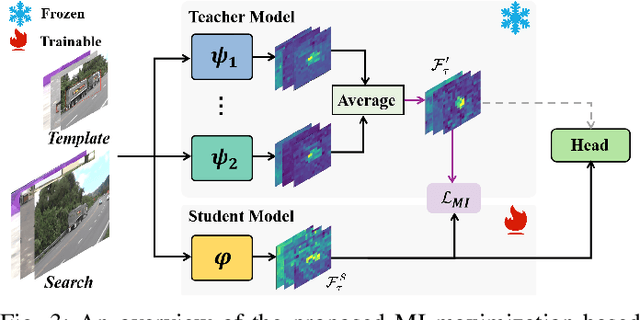
Visual tracking has made significant strides due to the adoption of transformer-based models. Most state-of-the-art trackers struggle to meet real-time processing demands on mobile platforms with constrained computing resources, particularly for real-time unmanned aerial vehicle (UAV) tracking. To achieve a better balance between performance and efficiency, we introduce AVTrack, an adaptive computation framework designed to selectively activate transformer blocks for real-time UAV tracking. The proposed Activation Module (AM) dynamically optimizes the ViT architecture by selectively engaging relevant components, thereby enhancing inference efficiency without significant compromise to tracking performance. Furthermore, to tackle the challenges posed by extreme changes in viewing angles often encountered in UAV tracking, the proposed method enhances ViTs' effectiveness by learning view-invariant representations through mutual information (MI) maximization. Two effective design principles are proposed in the AVTrack. Building on it, we propose an improved tracker, dubbed AVTrack-MD, which introduces the novel MI maximization-based multi-teacher knowledge distillation (MD) framework. It harnesses the benefits of multiple teachers, specifically the off-the-shelf tracking models from the AVTrack, by integrating and refining their outputs, thereby guiding the learning process of the compact student network. Specifically, we maximize the MI between the softened feature representations from the multi-teacher models and the student model, leading to improved generalization and performance of the student model, particularly in noisy conditions. Extensive experiments on multiple UAV tracking benchmarks demonstrate that AVTrack-MD not only achieves performance comparable to the AVTrack baseline but also reduces model complexity, resulting in a significant 17\% increase in average tracking speed.
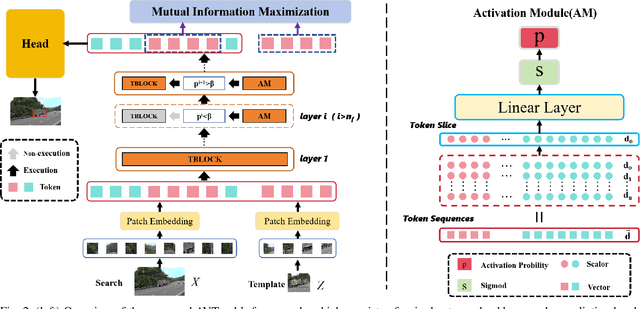
MambaNUT: Nighttime UAV Tracking via Mamba and Adaptive Curriculum Learning
Dec 01, 2024
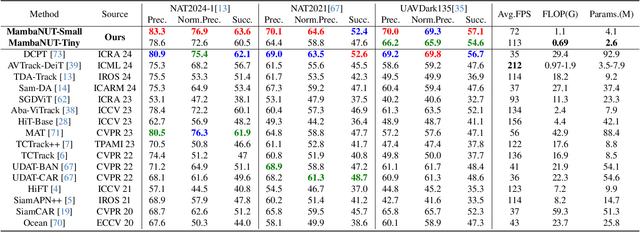
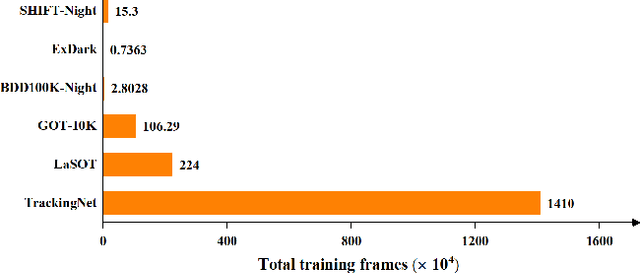

Harnessing low-light enhancement and domain adaptation, nighttime UAV tracking has made substantial strides. However, over-reliance on image enhancement, scarcity of high-quality nighttime data, and neglecting the relationship between daytime and nighttime trackers, which hinders the development of an end-to-end trainable framework. Moreover, current CNN-based trackers have limited receptive fields, leading to suboptimal performance, while ViT-based trackers demand heavy computational resources due to their reliance on the self-attention mechanism. In this paper, we propose a novel pure Mamba-based tracking framework (\textbf{MambaNUT}) that employs a state space model with linear complexity as its backbone, incorporating a single-stream architecture that integrates feature learning and template-search coupling within Vision Mamba. We introduce an adaptive curriculum learning (ACL) approach that dynamically adjusts sampling strategies and loss weights, thereby improving the model's ability of generalization. Our ACL is composed of two levels of curriculum schedulers: (1) sampling scheduler that transforms the data distribution from imbalanced to balanced, as well as from easier (daytime) to harder (nighttime) samples; (2) loss scheduler that dynamically assigns weights based on data frequency and the IOU. Exhaustive experiments on multiple nighttime UAV tracking benchmarks demonstrate that the proposed MambaNUT achieves state-of-the-art performance while requiring lower computational costs. The code will be available.
Learning Motion Blur Robust Vision Transformers with Dynamic Early Exit for Real-Time UAV Tracking
Jul 07, 2024



Recently, the surge in the adoption of single-stream architectures utilizing pre-trained ViT backbones represents a promising advancement in the field of generic visual tracking. By integrating feature extraction and fusion into a cohesive framework, these architectures offer improved performance, efficiency, and robustness. However, there has been limited exploration into optimizing these frameworks for UAV tracking. In this paper, we boost the efficiency of this framework by tailoring it into an adaptive computation framework that dynamically exits Transformer blocks for real-time UAV tracking. The motivation behind this is that tracking tasks with fewer challenges can be adequately addressed using low-level feature representations. Simpler tasks can often be handled with less demanding, lower-level features. This approach allows the model use computational resources more efficiently by focusing on complex tasks and conserving resources for easier ones. Another significant enhancement introduced in this paper is the improved effectiveness of ViTs in handling motion blur, a common issue in UAV tracking caused by the fast movements of either the UAV, the tracked objects, or both. This is achieved by acquiring motion blur robust representations through enforcing invariance in the feature representation of the target with respect to simulated motion blur. The proposed approach is dubbed BDTrack. Extensive experiments conducted on five tracking benchmarks validate the effectiveness and versatility of our approach, establishing it as a cutting-edge solution in real-time UAV tracking. Code is released at: https://github.com/wuyou3474/BDTrack.
Adaptively Bypassing Vision Transformer Blocks for Efficient Visual Tracking
Jun 12, 2024
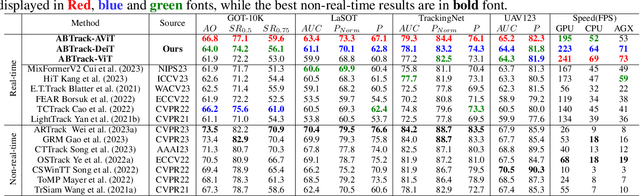
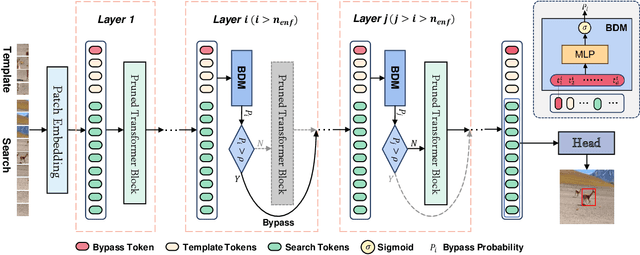
Empowered by transformer-based models, visual tracking has advanced significantly. However, the slow speed of current trackers limits their applicability on devices with constrained computational resources. To address this challenge, we introduce ABTrack, an adaptive computation framework that adaptively bypassing transformer blocks for efficient visual tracking. The rationale behind ABTrack is rooted in the observation that semantic features or relations do not uniformly impact the tracking task across all abstraction levels. Instead, this impact varies based on the characteristics of the target and the scene it occupies. Consequently, disregarding insignificant semantic features or relations at certain abstraction levels may not significantly affect the tracking accuracy. We propose a Bypass Decision Module (BDM) to determine if a transformer block should be bypassed, which adaptively simplifies the architecture of ViTs and thus speeds up the inference process. To counteract the time cost incurred by the BDMs and further enhance the efficiency of ViTs, we innovatively adapt a pruning technique to reduce the dimension of the latent representation of tokens in each transformer block. Extensive experiments on multiple tracking benchmarks validate the effectiveness and generality of the proposed method and show that it achieves state-of-the-art performance. Code is released at: \href{https://github.com/1HykhqV3rU/ABTrack}
Towards Discriminative Representations with Contrastive Instances for Real-Time UAV Tracking
Aug 22, 2023



Maintaining high efficiency and high precision are two fundamental challenges in UAV tracking due to the constraints of computing resources, battery capacity, and UAV maximum load. Discriminative correlation filters (DCF)-based trackers can yield high efficiency on a single CPU but with inferior precision. Lightweight Deep learning (DL)-based trackers can achieve a good balance between efficiency and precision but performance gains are limited by the compression rate. High compression rate often leads to poor discriminative representations. To this end, this paper aims to enhance the discriminative power of feature representations from a new feature-learning perspective. Specifically, we attempt to learn more disciminative representations with contrastive instances for UAV tracking in a simple yet effective manner, which not only requires no manual annotations but also allows for developing and deploying a lightweight model. We are the first to explore contrastive learning for UAV tracking. Extensive experiments on four UAV benchmarks, including UAV123@10fps, DTB70, UAVDT and VisDrone2018, show that the proposed DRCI tracker significantly outperforms state-of-the-art UAV tracking methods.
Learning Disentangled Representation with Mutual Information Maximization for Real-Time UAV Tracking
Aug 20, 2023Efficiency has been a critical problem in UAV tracking due to limitations in computation resources, battery capacity, and unmanned aerial vehicle maximum load. Although discriminative correlation filters (DCF)-based trackers prevail in this field for their favorable efficiency, some recently proposed lightweight deep learning (DL)-based trackers using model compression demonstrated quite remarkable CPU efficiency as well as precision. Unfortunately, the model compression methods utilized by these works, though simple, are still unable to achieve satisfying tracking precision with higher compression rates. This paper aims to exploit disentangled representation learning with mutual information maximization (DR-MIM) to further improve DL-based trackers' precision and efficiency for UAV tracking. The proposed disentangled representation separates the feature into an identity-related and an identity-unrelated features. Only the latter is used, which enhances the effectiveness of the feature representation for subsequent classification and regression tasks. Extensive experiments on four UAV benchmarks, including UAV123@10fps, DTB70, UAVDT and VisDrone2018, show that our DR-MIM tracker significantly outperforms state-of-the-art UAV tracking methods.