 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDataset Distillation-based Hybrid Federated Learning on Non-IID Data
Sep 26, 2024In federated learning, the heterogeneity of client data has a great impact on the performance of model training. Many heterogeneity issues in this process are raised by non-independently and identically distributed (Non-IID) data. This study focuses on the issue of label distribution skew. To address it, we propose a hybrid federated learning framework called HFLDD, which integrates dataset distillation to generate approximately independent and equally distributed (IID) data, thereby improving the performance of model training. Particularly, we partition the clients into heterogeneous clusters, where the data labels among different clients within a cluster are unbalanced while the data labels among different clusters are balanced. The cluster headers collect distilled data from the corresponding cluster members, and conduct model training in collaboration with the server. This training process is like traditional federated learning on IID data, and hence effectively alleviates the impact of Non-IID data on model training. Furthermore, we compare our proposed method with typical baseline methods on public datasets. Experimental results demonstrate that when the data labels are severely imbalanced, the proposed HFLDD outperforms the baseline methods in terms of both test accuracy and communication cost.
Semantic Communication for Edge Intelligence Enabled Autonomous Driving System
Jun 15, 2024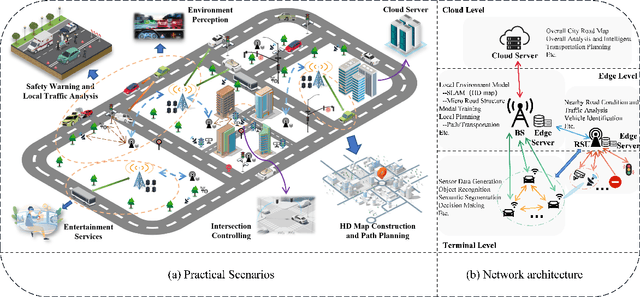



Expected to provide higher transportation efficiency and security, autonomous driving has attracted substantial attentions from both industry and academia. Meanwhile, the emergence of edge intelligence has further introduced significant advancements to this field. However, the crucial demands of ultra-reliable and low-latency communications (URLLC) among the vehicles and edge servers have hindered the development of autonomous driving. In this article, we provide a brief overview of edge intelligence enabled autonomous driving system and current vehicle-to-everything (V2X) technologies. Moreover, challenges associated with massive data transmission in autonomous driving are highlighted from three perspectives: multi-modal data transmission and fusion, multi-user collaboration and connection, and multi-task training and execution. To cope with these challenges, we propose to incorporate semantic communication into autonomous driving to achieve highly efficient and task-oriented data transmission. Unlike traditional communications, semantic communication extracts task-relevant semantic feature from multi-sensory data. Specifically, a unified multi-user semantic communication system for transmitting multi-modal data and performing multi-task execution is designed for collaborative data transmission and decision making in autonomous driving. Simulation results demonstrate that the proposed system can significantly reduce data transmission volume without compromising task performance, as evidenced by the realization of a cooperative multi-vehicle target classification and detection task.