 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOceanGym: A Benchmark Environment for Underwater Embodied Agents
Sep 30, 2025We introduce OceanGym, the first comprehensive benchmark for ocean underwater embodied agents, designed to advance AI in one of the most demanding real-world environments. Unlike terrestrial or aerial domains, underwater settings present extreme perceptual and decision-making challenges, including low visibility, dynamic ocean currents, making effective agent deployment exceptionally difficult. OceanGym encompasses eight realistic task domains and a unified agent framework driven by Multi-modal Large Language Models (MLLMs), which integrates perception, memory, and sequential decision-making. Agents are required to comprehend optical and sonar data, autonomously explore complex environments, and accomplish long-horizon objectives under these harsh conditions. Extensive experiments reveal substantial gaps between state-of-the-art MLLM-driven agents and human experts, highlighting the persistent difficulty of perception, planning, and adaptability in ocean underwater environments. By providing a high-fidelity, rigorously designed platform, OceanGym establishes a testbed for developing robust embodied AI and transferring these capabilities to real-world autonomous ocean underwater vehicles, marking a decisive step toward intelligent agents capable of operating in one of Earth's last unexplored frontiers. The code and data are available at https://github.com/OceanGPT/OceanGym.
Control System Design and Experiments for Autonomous Underwater Helicopter Docking Procedure Based on Acoustic-inertial-optical Guidance
Oct 09, 2024
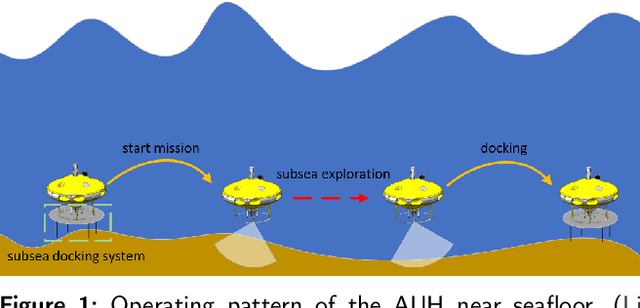
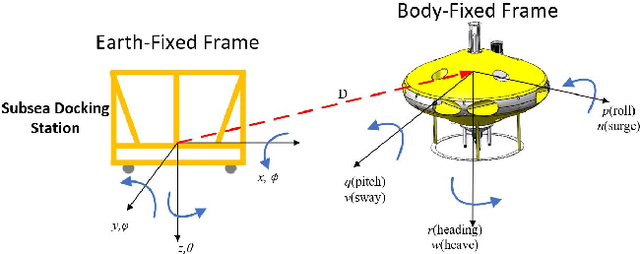

A control system structure for the underwater docking procedure of an Autonomous Underwater Helicopter (AUH) is proposed in this paper, which utilizes acoustic-inertial-optical guidance. Unlike conventional Autonomous Underwater Vehicles (AUVs), the maneuverability requirements for AUHs are more stringent during the docking procedure, requiring it to remain stationary or have minimal horizontal movement while moving vertically. The docking procedure is divided into two stages: Homing and Landing, each stage utilizing different guidance methods. Additionally, a segmented aligning strategy operating at various altitudes and a linear velocity decision are both adopted in Landing stage. Due to the unique structure of the Subsea Docking System (SDS), the AUH is required to dock onto the SDS in a fixed orientation with specific attitude and altitude. Therefore, a particular criterion is proposed to determine whether the AUH has successfully docked onto the SDS. Furthermore, the effectiveness and robustness of the proposed control method in AUH's docking procedure are demonstrated through pool experiments and sea trials.