 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttend2Pack: Bin Packing through Deep Reinforcement Learning with Attention
Aug 02, 2021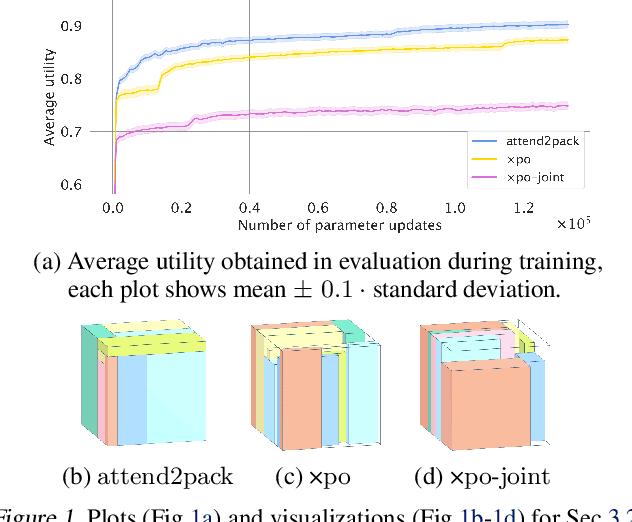
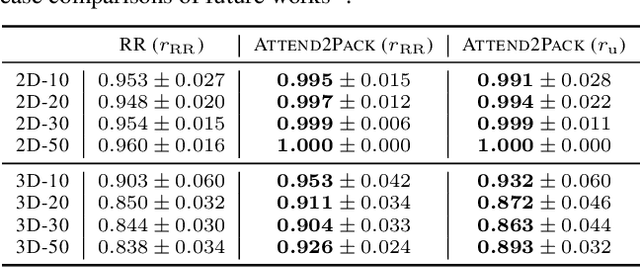

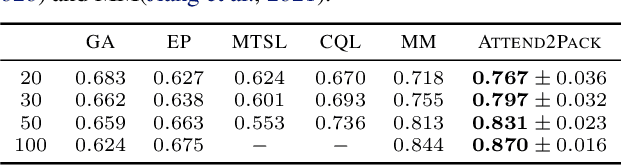
This paper seeks to tackle the bin packing problem (BPP) through a learning perspective. Building on self-attention-based encoding and deep reinforcement learning algorithms, we propose a new end-to-end learning model for this task of interest. By decomposing the combinatorial action space, as well as utilizing a new training technique denoted as prioritized oversampling, which is a general scheme to speed up on-policy learning, we achieve state-of-the-art performance in a range of experimental settings. Moreover, although the proposed approach attend2pack targets offline-BPP, we strip our method down to the strict online-BPP setting where it is also able to achieve state-of-the-art performance. With a set of ablation studies as well as comparisons against a range of previous works, we hope to offer as a valid baseline approach to this field of study.
A Pipeline for Integrated Theory and Data-Driven Modeling of Genomic and Clinical Data
May 05, 2020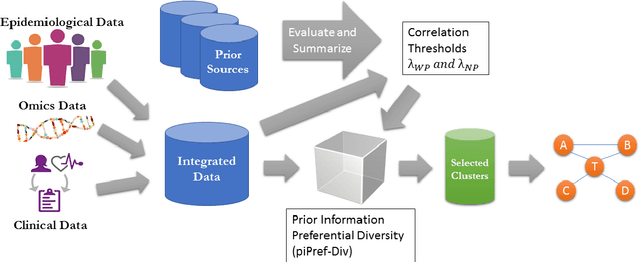
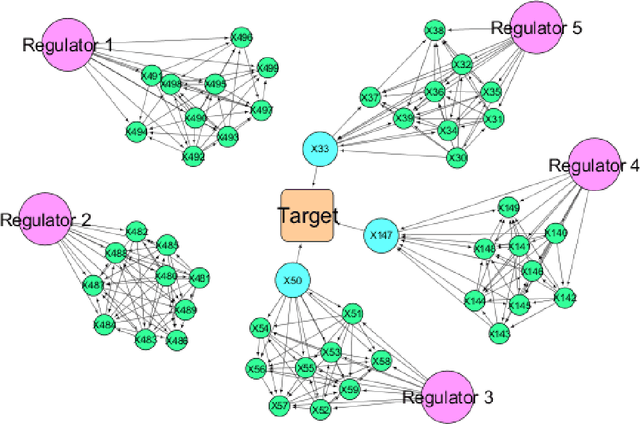
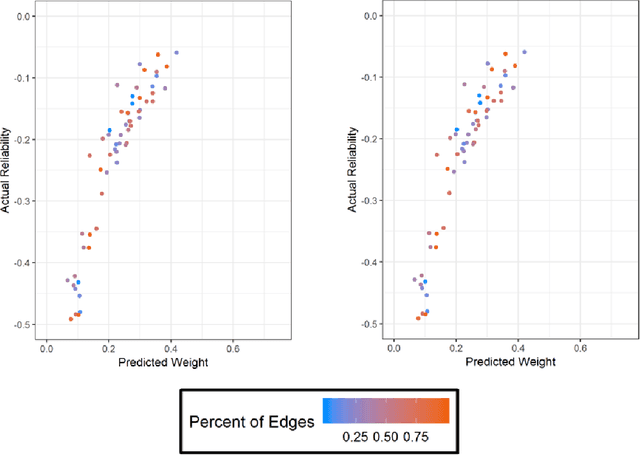
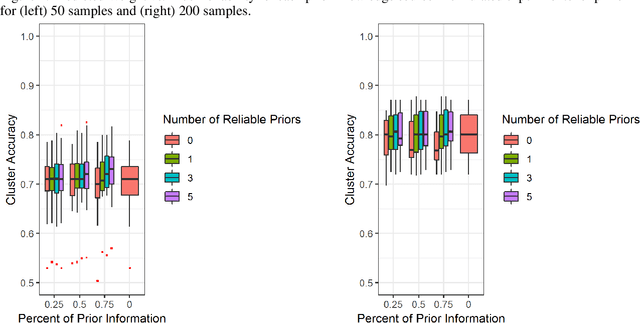
High throughput genome sequencing technologies such as RNA-Seq and Microarray have the potential to transform clinical decision making and biomedical research by enabling high-throughput measurements of the genome at a granular level. However, to truly understand causes of disease and the effects of medical interventions, this data must be integrated with phenotypic, environmental, and behavioral data from individuals. Further, effective knowledge discovery methods that can infer relationships between these data types are required. In this work, we propose a pipeline for knowledge discovery from integrated genomic and clinical data. The pipeline begins with a novel variable selection method, and uses a probabilistic graphical model to understand the relationships between features in the data. We demonstrate how this pipeline can improve breast cancer outcome prediction models, and can provide a biologically interpretable view of sequencing data.
Support Relation Analysis for Objects in Multiple View RGB-D Images
May 10, 2019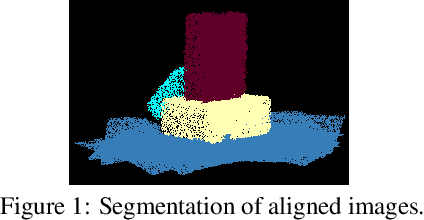
Understanding physical relations between objects, especially their support relations, is crucial for robotic manipulation. There has been work on reasoning about support relations and structural stability of simple configurations in RGB-D images. In this paper, we propose a method for extracting more detailed physical knowledge from a set of RGB-D images taken from the same scene but from different views using qualitative reasoning and intuitive physical models. Rather than providing a simple contact relation graph and approximating stability over convex shapes, our method is able to provide a detailed supporting relation analysis based on a volumetric representation. Specifically, true supporting relations between objects (e.g., if an object supports another object by touching it on the side or if the object above contributes to the stability of the object below) are identified. We apply our method to real-world structures captured in warehouse scenarios and show our method works as desired.
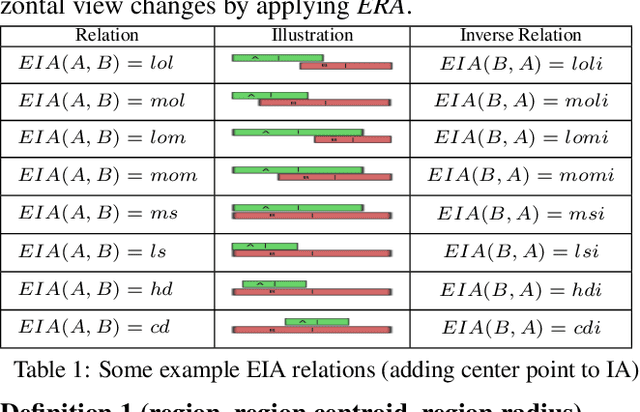
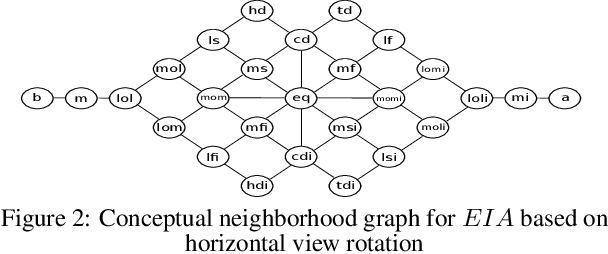
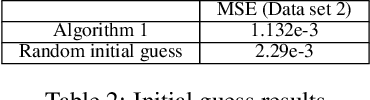
Towards Explainable Inference about Object Motion using Qualitative Reasoning
Jul 28, 2018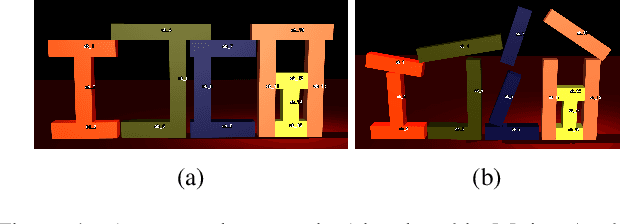
The capability of making explainable inferences regarding physical processes has long been desired. One fundamental physical process is object motion. Inferring what causes the motion of a group of objects can even be a challenging task for experts, e.g., in forensics science. Most of the work in the literature relies on physics simulation to draw such infer- ences. The simulation requires a precise model of the under- lying domain to work well and is essentially a black-box from which one can hardly obtain any useful explanation. By contrast, qualitative reasoning methods have the advan- tage in making transparent inferences with ambiguous infor- mation, which makes it suitable for this task. However, there has been no suitable qualitative theory proposed for object motion in three-dimensional space. In this paper, we take this challenge and develop a qualitative theory for the motion of rigid objects. Based on this theory, we develop a reasoning method to solve a very interesting problem: Assuming there are several objects that were initially at rest and now have started to move. We want to infer what action causes the movement of these objects.
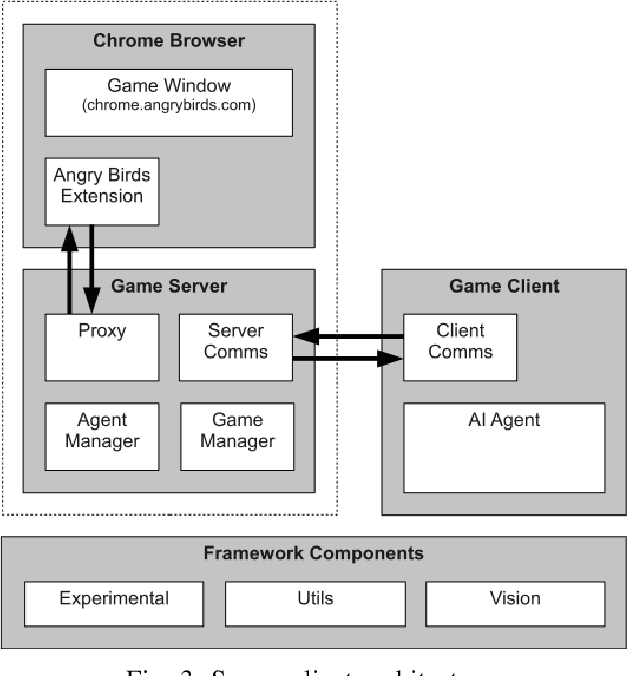
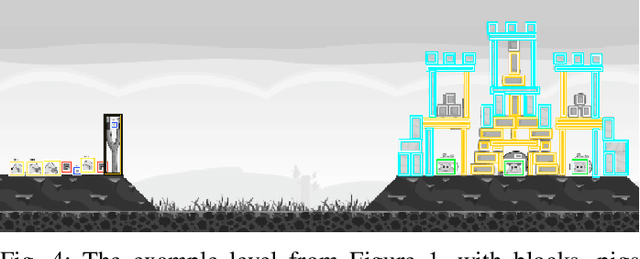
The 2017 AIBIRDS Competition
Mar 14, 2018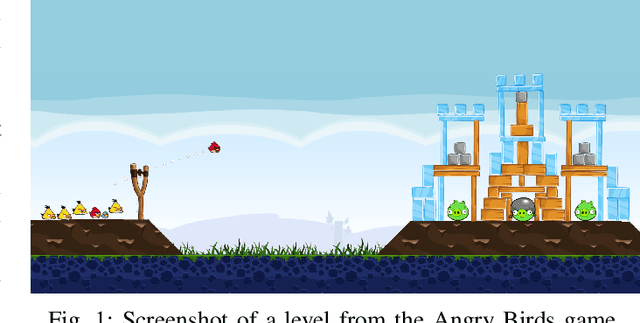

This paper presents an overview of the sixth AIBIRDS competition, held at the 26th International Joint Conference on Artificial Intelligence. This competition tasked participants with developing an intelligent agent which can play the physics-based puzzle game Angry Birds. This game uses a sophisticated physics engine that requires agents to reason and predict the outcome of actions with only limited environmental information. Agents entered into this competition were required to solve a wide assortment of previously unseen levels within a set time limit. The physical reasoning and planning required to solve these levels are very similar to those of many real-world problems. This year's competition featured some of the best agents developed so far and even included several new AI techniques such as deep reinforcement learning. Within this paper we describe the framework, rules, submitted agents and results for this competition. We also provide some background information on related work and other video game AI competitions, as well as discussing some potential ideas for future AIBIRDS competitions and agent improvements.