 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Theoretical Framework for Robust Node Deployment in Cooperative ISAC Networks
Jan 03, 2026This paper investigates node deployment strategies for robust multi-node cooperative localization in integrated sensing and communication (ISAC) networks.We first analyze how steering vector correlation across different positions affects localization performance and introduce a novel distance-weighted correlation metric to characterize this effect. Building upon this insight, we propose a deployment optimization framework that minimizes the maximum weighted steering vector correlation by optimizing simultaneously node positions and array orientations, thereby enhancing worst-case network robustness. Then, a genetic algorithm (GA) is developed to solve this min-max optimization, yielding optimized node positions and array orientations. Extensive simulations using both multiple signal classification (MUSIC) and neural-network (NN)-based localization validate the effectiveness of the proposed methods, demonstrating significant improvements in robust localization performance.
ToolSample: Dual Dynamic Sampling Methods with Curriculum Learning for RL-based Tool Learning
Sep 18, 2025While reinforcement learning (RL) is increasingly used for LLM-based tool learning, its efficiency is often hampered by an overabundance of simple samples that provide diminishing learning value as training progresses. Existing dynamic sampling techniques are ill-suited for the multi-task structure and fine-grained reward mechanisms inherent to tool learning. This paper introduces Dynamic Sampling with Curriculum Learning (DSCL), a framework specifically designed to address this challenge by targeting the unique characteristics of tool learning: its multiple interdependent sub-tasks and multi-valued reward functions. DSCL features two core components: Reward-Based Dynamic Sampling, which uses multi-dimensional reward statistics (mean and variance) to prioritize valuable data, and Task-Based Dynamic Curriculum Learning, which adaptively focuses training on less-mastered sub-tasks. Through extensive experiments, we demonstrate that DSCL significantly improves training efficiency and model performance over strong baselines, achieving a 3.29\% improvement on the BFCLv3 benchmark. Our method provides a tailored solution that effectively leverages the complex reward signals and sub-task dynamics within tool learning to achieve superior results.
Improving Generalization in Intent Detection: GRPO with Reward-Based Curriculum Sampling
Apr 21, 2025Intent detection, a critical component in task-oriented dialogue (TOD) systems, faces significant challenges in adapting to the rapid influx of integrable tools with complex interrelationships. Existing approaches, such as zero-shot reformulations and LLM-based dynamic recognition, struggle with performance degradation when encountering unseen intents, leading to erroneous task routing. To enhance the model's generalization performance on unseen tasks, we employ Reinforcement Learning (RL) combined with a Reward-based Curriculum Sampling (RCS) during Group Relative Policy Optimization (GRPO) training in intent detection tasks. Experiments demonstrate that RL-trained models substantially outperform supervised fine-tuning (SFT) baselines in generalization. Besides, the introduction of the RCS, significantly bolsters the effectiveness of RL in intent detection by focusing the model on challenging cases during training. Moreover, incorporating Chain-of-Thought (COT) processes in RL notably improves generalization in complex intent detection tasks, underscoring the importance of thought in challenging scenarios. This work advances the generalization of intent detection tasks, offering practical insights for deploying adaptable dialogue systems.
RG-Attn: Radian Glue Attention for Multi-modality Multi-agent Cooperative Perception
Jan 28, 2025Cooperative perception offers an optimal solution to overcome the perception limitations of single-agent systems by leveraging Vehicle-to-Everything (V2X) communication for data sharing and fusion across multiple agents. However, most existing approaches focus on single-modality data exchange, limiting the potential of both homogeneous and heterogeneous fusion across agents. This overlooks the opportunity to utilize multi-modality data per agent, restricting the system's performance. In the automotive industry, manufacturers adopt diverse sensor configurations, resulting in heterogeneous combinations of sensor modalities across agents. To harness the potential of every possible data source for optimal performance, we design a robust LiDAR and camera cross-modality fusion module, Radian-Glue-Attention (RG-Attn), applicable to both intra-agent cross-modality fusion and inter-agent cross-modality fusion scenarios, owing to the convenient coordinate conversion by transformation matrix and the unified sampling/inversion mechanism. We also propose two different architectures, named Paint-To-Puzzle (PTP) and Co-Sketching-Co-Coloring (CoS-CoCo), for conducting cooperative perception. PTP aims for maximum precision performance and achieves smaller data packet size by limiting cross-agent fusion to a single instance, but requiring all participants to be equipped with LiDAR. In contrast, CoS-CoCo supports agents with any configuration-LiDAR-only, camera-only, or LiDAR-camera-both, presenting more generalization ability. Our approach achieves state-of-the-art (SOTA) performance on both real and simulated cooperative perception datasets. The code will be released at GitHub in early 2025.
Generating Physical Dynamics under Priors
Sep 01, 2024Generating physically feasible dynamics in a data-driven context is challenging, especially when adhering to physical priors expressed in specific equations or formulas. Existing methodologies often overlook the integration of physical priors, resulting in violation of basic physical laws and suboptimal performance. In this paper, we introduce a novel framework that seamlessly incorporates physical priors into diffusion-based generative models to address this limitation. Our approach leverages two categories of priors: 1) distributional priors, such as roto-translational invariance, and 2) physical feasibility priors, including energy and momentum conservation laws and PDE constraints. By embedding these priors into the generative process, our method can efficiently generate physically realistic dynamics, encompassing trajectories and flows. Empirical evaluations demonstrate that our method produces high-quality dynamics across a diverse array of physical phenomena with remarkable robustness, underscoring its potential to advance data-driven studies in AI4Physics. Our contributions signify a substantial advancement in the field of generative modeling, offering a robust solution to generate accurate and physically consistent dynamics.
On Diffusion Process in SE-invariant Space
Mar 03, 2024
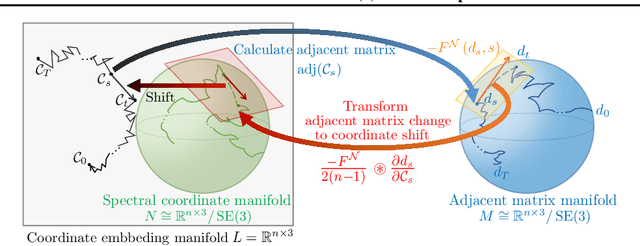
Sampling viable 3D structures (e.g., molecules and point clouds) with SE(3)-invariance using diffusion-based models proved promising in a variety of real-world applications, wherein SE(3)-invariant properties can be naturally characterized by the inter-point distance manifold. However, due to the non-trivial geometry, we still lack a comprehensive understanding of the diffusion mechanism within such SE(3)-invariant space. This study addresses this gap by mathematically delineating the diffusion mechanism under SE(3)-invariance, via zooming into the interaction behavior between coordinates and the inter-point distance manifold through the lens of differential geometry. Upon this analysis, we propose accurate and projection-free diffusion SDE and ODE accordingly. Such formulations enable enhancing the performance and the speed of generation pathways; meanwhile offering valuable insights into other systems incorporating SE(3)-invariance.
Carbon Emission Prediction and Clean Industry Transformation Based on Machine Learning: A Case Study of Sichuan Province
Sep 03, 2023



This study preprocessed 2000-2019 energy consumption data for 46 key Sichuan industries using matrix normalization. DBSCAN clustering identified 16 feature classes to objectively group industries. Penalized regression models were then applied for their advantages in overfitting control, high-dimensional data processing, and feature selection - well-suited for the complex energy data. Results showed the second cluster around coal had highest emissions due to production needs. Emissions from gasoline-focused and coke-focused clusters were also significant. Based on this, emission reduction suggestions included clean coal technologies, transportation management, coal-electricity replacement in steel, and industry standardization. The research introduced unsupervised learning to objectively select factors and aimed to explore new emission reduction avenues. In summary, the study identified industry groupings, assessed emissions drivers, and proposed scientific reduction strategies to better inform decision-making using algorithms like DBSCAN and penalized regression models.