 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Unsupervised Small Area Change Detection from SAR Imagery Using Deep Learning
Nov 22, 2020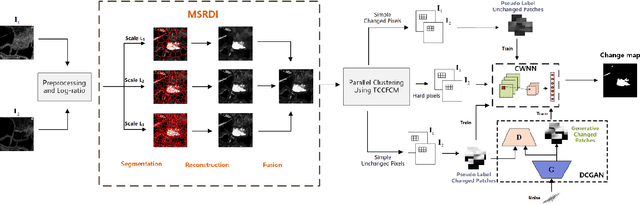
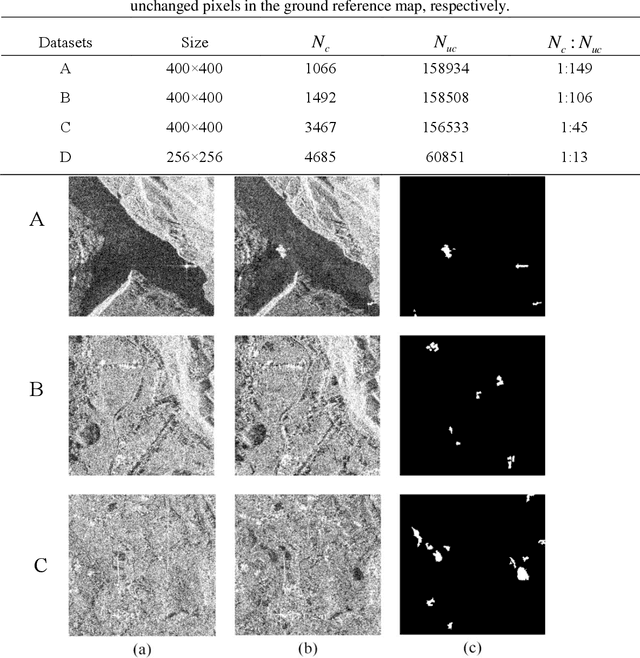
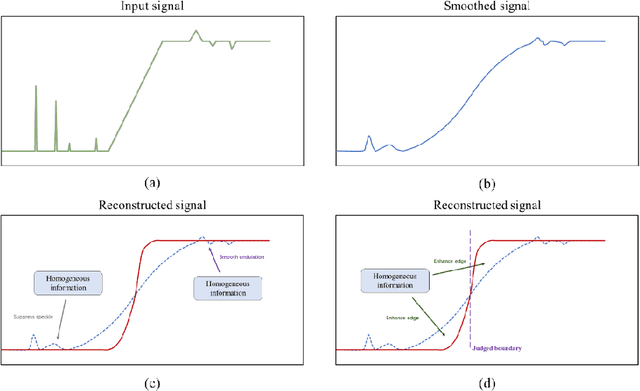
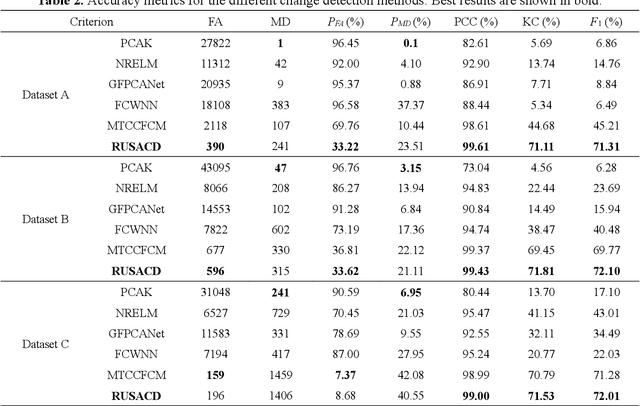
Small area change detection from synthetic aperture radar (SAR) is a highly challenging task. In this paper, a robust unsupervised approach is proposed for small area change detection from multi-temporal SAR images using deep learning. First, a multi-scale superpixel reconstruction method is developed to generate a difference image (DI), which can suppress the speckle noise effectively and enhance edges by exploiting local, spatially homogeneous information. Second, a two-stage centre-constrained fuzzy c-means clustering algorithm is proposed to divide the pixels of the DI into changed, unchanged and intermediate classes with a parallel clustering strategy. Image patches belonging to the first two classes are then constructed as pseudo-label training samples, and image patches of the intermediate class are treated as testing samples. Finally, a convolutional wavelet neural network (CWNN) is designed and trained to classify testing samples into changed or unchanged classes, coupled with a deep convolutional generative adversarial network (DCGAN) to increase the number of changed class within the pseudo-label training samples. Numerical experiments on four real SAR datasets demonstrate the validity and robustness of the proposed approach, achieving up to 99.61% accuracy for small area change detection.
A Novel Self-Organizing PID Approach for Controlling Mobile Robot Locomotion
Dec 17, 2019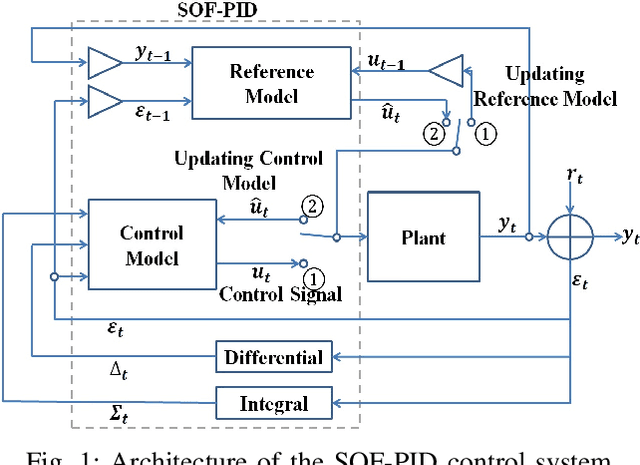
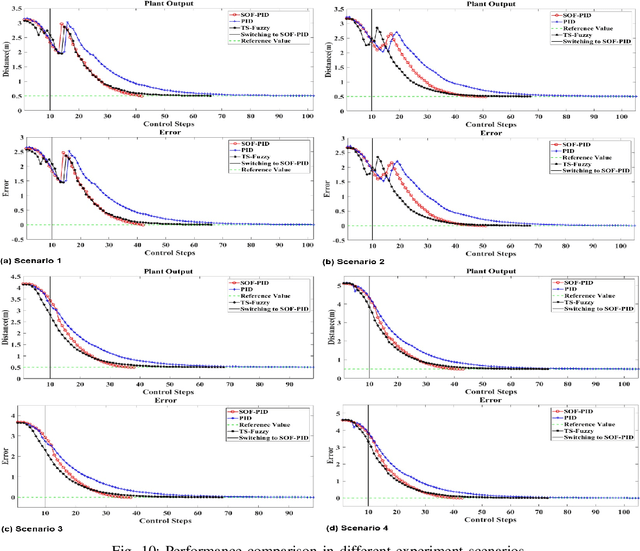

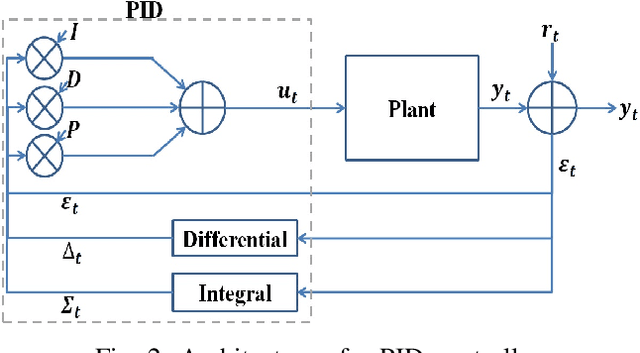
A novel self-organizing fuzzy proportional-integral-derivative (SOF-PID) control system is proposed in this paper. The proposed system consists of a pair of control and reference models, both of which are implemented by a first-order autonomous learning multiple model (ALMMo) neuro-fuzzy system. The SOF-PID controller self-organizes and self-updates the structures and meta-parameters of both the control and reference models during the control process "on the fly". This gives the SOF-PID control system the capability of quickly adapting to entirely new operating environments without a full re-training. Moreover, the SOF-PID control system is free from user- and problem-specific parameters, and the uniform stability of the SOF-PID control system is theoretically guaranteed. Simulations and real-world experiments with mobile robots demonstrate the effectiveness and validity of the proposed SOF-PID control system.
A Self-Adaptive Synthetic Over-Sampling Technique for Imbalanced Classification
Nov 25, 2019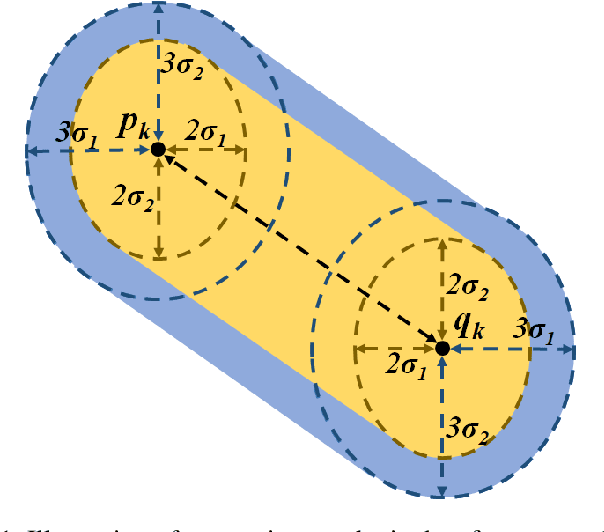



Traditionally, in supervised machine learning, (a significant) part of the available data (usually 50% to 80%) is used for training and the rest for validation. In many problems, however, the data is highly imbalanced in regard to different classes or does not have good coverage of the feasible data space which, in turn, creates problems in validation and usage phase. In this paper, we propose a technique for synthesising feasible and likely data to help balance the classes as well as to boost the performance in terms of confusion matrix as well as overall. The idea, in a nutshell, is to synthesise data samples in close vicinity to the actual data samples specifically for the less represented (minority) classes. This has also implications to the so-called fairness of machine learning. In this paper, we propose a specific method for synthesising data in a way to balance the classes and boost the performance, especially of the minority classes. It is generic and can be applied to different base algorithms, e.g. support vector machine, k-nearest neighbour, deep networks, rule-based classifiers, decision trees, etc. The results demonstrated that: i) a significantly more balanced (and fair) classification results can be achieved; ii) that the overall performance as well as the performance per class measured by confusion matrix can be boosted. In addition, this approach can be very valuable for the cases when the number of actual available labelled data is small which itself is one of the problems of the contemporary machine learning.