 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Self-Organizing PID Approach for Controlling Mobile Robot Locomotion
Paper and Code
Dec 17, 2019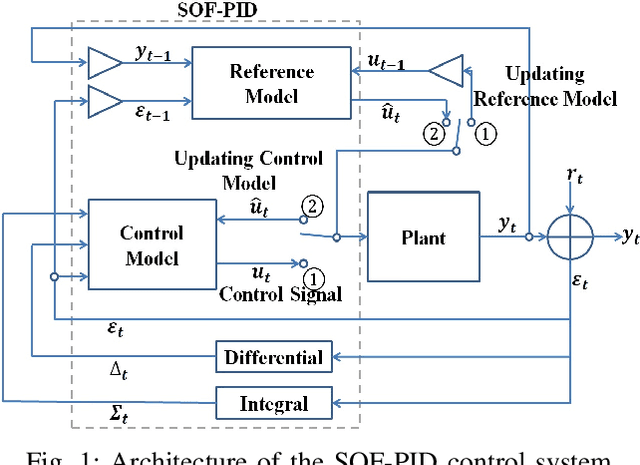
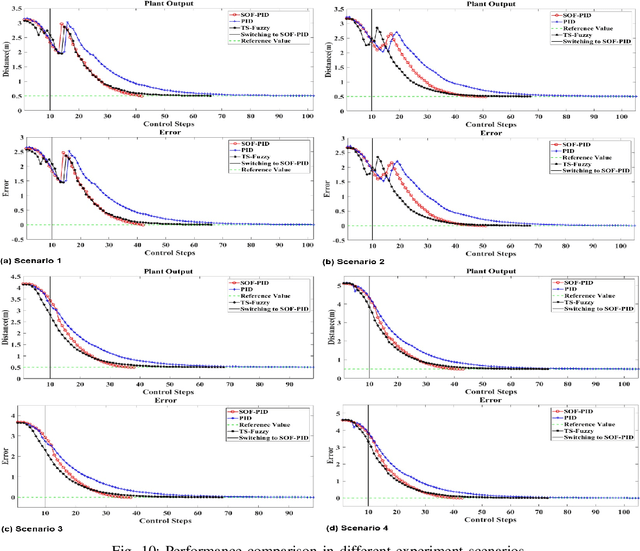

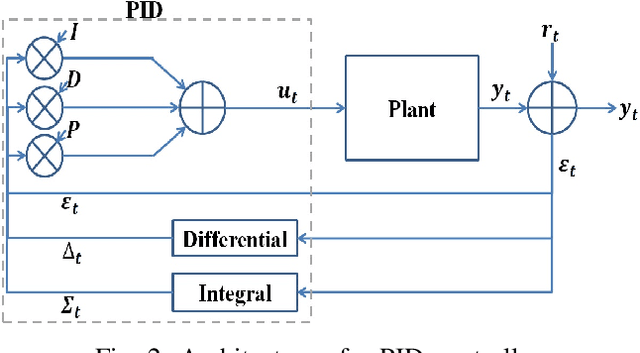
A novel self-organizing fuzzy proportional-integral-derivative (SOF-PID) control system is proposed in this paper. The proposed system consists of a pair of control and reference models, both of which are implemented by a first-order autonomous learning multiple model (ALMMo) neuro-fuzzy system. The SOF-PID controller self-organizes and self-updates the structures and meta-parameters of both the control and reference models during the control process "on the fly". This gives the SOF-PID control system the capability of quickly adapting to entirely new operating environments without a full re-training. Moreover, the SOF-PID control system is free from user- and problem-specific parameters, and the uniform stability of the SOF-PID control system is theoretically guaranteed. Simulations and real-world experiments with mobile robots demonstrate the effectiveness and validity of the proposed SOF-PID control system.